Transformação Bilinear
1 Discretização de filtros analógicos
A transformação bilinear do domínio da Transformada de Laplace para o domínio da Transformada z é feito por
O mapeamento inverso em é feita por
é uma aproximação de primeira ordem do logaritmo pela série de potência
Essa transformação é o resulta em um mapeamento exato do plano z no plano s através de
| Demonstração |
|---|
|
|
Ela pode ser utilizada para ser transformar um sistema linear invariante no tempo continuo (filtro analógico) em um sistema linear invariante no tempo discreto (filtro digital) , e vice-versa. O mapeamento da função em é feita por:
O mapeamento inverso em é feita pela aproximação de primeira ordem da substituição
| Demonstração |
|---|
|
|
2 Empenamento de frequência (frequency warping)
Determinar a resposta de frequência em filtro analógico (de tempo contínuo), a função de transferência é avaliada em , que corresponde aos valores dessa função no eixo imaginário . Da mesma forma para filtros digitais (de tempo discreto), a função de transferência é avaliada em , correspondendo aos valores sobre o circulo unitário pois possui magnitude constante .
A transformação bilinear mapeia o eixo imaginário do plano s no circulo unitário no plano z, no entanto o mapeamento das frequências não é linear, sofrendo um empenamento (distorção). Para utilizar essa transformação na obtenção de filtros digitais a partir de filtros analógicos, é necessário determinar como cada frequencia do filtro final desejado deve ser projetada no filtro analógico . Essa distorção pode ser obtida fazendo a substituição de na equação da transformação bilinear, e aplicando a fórmula de Euler para o seno.
| Demonstração | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
Considere que: e que
|
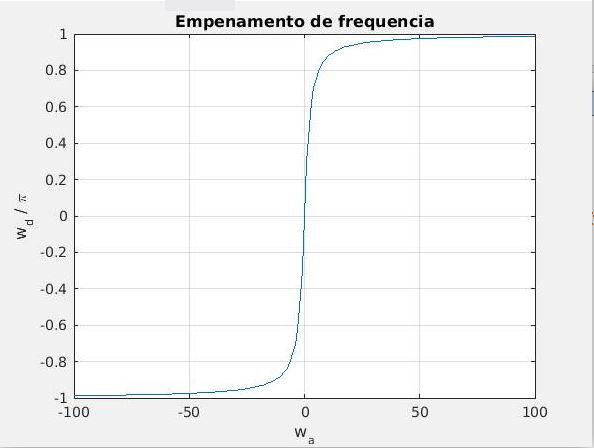
Isso mostra que cada ponto no circulo unitário do plano z é mapeado em um ponto no eixo imaginário do plano s. E que as frequências do filtro digital são mapeadas nas frequencias analógicas pela equação:
Além disso a faixa infinita de frequências do filtro analógico
é mapeada no filtro digital no intervalo limitado
- Figura - Empenamento de frequencia resultado da transformada Bilinear, para T = 1