Mudanças entre as edições de "PSD29007-Engtelecom(2017-2) - Prof. Marcos Moecke"
| Linha 742: | Linha 742: | ||
===Unidade 4=== | ===Unidade 4=== | ||
| − | ;Aula 24 (6 Nov) | + | ;Aula 24 (6 Nov): |
*Realização de Filtros | *Realização de Filtros | ||
:* Realização de filtros FIR: Forma Direta. | :* Realização de filtros FIR: Forma Direta. | ||
| Linha 773: | Linha 773: | ||
:* Estudar [http://www.mathworks.com/help/simulink/slref/discretefirfilter.html estrutura de filtros disrcetos FIR no Matlab], [http://www.mathworks.com/help/dsp/ref/filterrealizationwizard.html Filter Realization Wizard - Reference], [http://www.mathworks.com/help/dsp/ug/filter-realization-wizard.html Filter Realization Wizard - User Guide]. | :* Estudar [http://www.mathworks.com/help/simulink/slref/discretefirfilter.html estrutura de filtros disrcetos FIR no Matlab], [http://www.mathworks.com/help/dsp/ref/filterrealizationwizard.html Filter Realization Wizard - Reference], [http://www.mathworks.com/help/dsp/ug/filter-realization-wizard.html Filter Realization Wizard - User Guide]. | ||
:*Ver pag. 303 a 312 de <ref name="SHENOI2006"/>. | :*Ver pag. 303 a 312 de <ref name="SHENOI2006"/>. | ||
| − | + | ||
| − | ;Aula 27 (9 Nov) | + | ;Aula 27 (9 Nov): |
:* Realização de Filtros usando o comando [http://www.mathworks.com/help/dsp/ref/realizemdl.html realizemdl] do MatLab | :* Realização de Filtros usando o comando [http://www.mathworks.com/help/dsp/ref/realizemdl.html realizemdl] do MatLab | ||
<syntaxhighlight lang=matlab> | <syntaxhighlight lang=matlab> | ||
| Linha 807: | Linha 807: | ||
::* Ver [http://www.mathworks.com/help/dsp/ref/polyphase.html polyphase], [http://www.mathworks.com/help/dsp/ref/mfilt.firdecim.html mfilt.firdecim], [http://www.mathworks.com/help/dsp/ref/dsp.firdecimator-class.html dsp.FIRDecimator] | ::* Ver [http://www.mathworks.com/help/dsp/ref/polyphase.html polyphase], [http://www.mathworks.com/help/dsp/ref/mfilt.firdecim.html mfilt.firdecim], [http://www.mathworks.com/help/dsp/ref/dsp.firdecimator-class.html dsp.FIRDecimator] | ||
| − | + | ====ATUAL==== | |
| + | ;Aula 28 (13 Nov): | ||
:* Realização de filtros IIR de 2ª ordem: Forma Direta I e II, e Forma Transposta I e II. | :* Realização de filtros IIR de 2ª ordem: Forma Direta I e II, e Forma Transposta I e II. | ||
:<math> H(z) = \frac{Y(z)}{X(z)}, H(z) = \frac{b_0 z^2 + b_1 z^1 + b_2}{z^2 + a_1 z^1 + a_2}, H(z) = \frac{b_0 + b_1 z^{-1} + b_2 z^{-2}}{1 + a_1 z^{-1} + a_2 z^{-2}} </math> | :<math> H(z) = \frac{Y(z)}{X(z)}, H(z) = \frac{b_0 z^2 + b_1 z^1 + b_2}{z^2 + a_1 z^1 + a_2}, H(z) = \frac{b_0 + b_1 z^{-1} + b_2 z^{-2}}{1 + a_1 z^{-1} + a_2 z^{-2}} </math> | ||
| Linha 861: | Linha 862: | ||
:*Função para projeto de filtros - [http://www.mathworks.com/help/signal/ref/designfilt.html designfilt] | :*Função para projeto de filtros - [http://www.mathworks.com/help/signal/ref/designfilt.html designfilt] | ||
| + | <!-- | ||
;Aula 27 (29 Mai) | ;Aula 27 (29 Mai) | ||
*Filtros Digitais: Utilização de filtros FIR | *Filtros Digitais: Utilização de filtros FIR | ||
Edição das 14h22min de 13 de novembro de 2017
Registro on-line das aulas
Unidade 1
- Aula 1 (27 Jul)
- Apresentação da disciplina
- Autoinscrição na Plataforma Moodle de PSD29007 (PSD29006-2017-2)
- Revisão de Sinais e Sistemas no tempo discreto em Matlab:
- Resposta de sistemas LTI (Experimento 1.1)
- Relembrar o conceito de equação de diferenças de um sistema LTI discreto e resposta ao impulso.
- Resposta ao delta de Kronecker do sistema LTI discreto
- onde , e logo
![{\displaystyle a_{0}y[n]+a_{1}y[n-1]+a_{2}y[n-2]+...+a_{N}y[n-N]=b_{0}x[n]+b_{1}x[n-1]+b_{2}x[n-2]+...+b_{M}x[n-M]}](https://en.wikipedia.org/api/rest_v1/media/math/render/svg/2fdad1289d7711229e709a9c36c8f385ed537a35)



![{\displaystyle y[n]=1/\alpha .y[n-1]+x[n]}](https://en.wikipedia.org/api/rest_v1/media/math/render/svg/10da5ab4bf7cd4e118f984c8142364ce6a4143ac)
% Exemplos e Experimentos baseados no livro:
% DINIZ, P. S. R., DA SILVA, E. A. B., e LIMA NETTO, S. Processamento Digital de Sinais: Projeto e Análise de Sistemas. 2. ed. Porto Alegre: Bookman, 2014. 976 p. ISBN 978-8582601235.
%% Experimento 1.1
alpha = 1.15; N = 256;
x = [1 zeros(1,N)];
y = filter(1,[1 -1/alpha],x);
stem(y);
- Para usar melhor a interface do Matlab leia também o Help, lembre-se que o F9 executa o código destacado no Help. Programação com scripts .m.
- Aula 2 (31 Jul)
- Revisão de Sinais e Sistemas no tempo discreto em Matlab:
- Amostragem de Sinais (Experimento 1.2)
- Relembrar teorema da amostragem. Efeito da amostragem abaixo da frequência de Nyquist. Aliasing.
- Notar que as amostras de um sinal (3 Hz) e um sinal (7 Hz) são idênticas quando amostrado com um sinal de 10 Hz.


% Exemplos e Experimentos baseados no livro:
% DINIZ, P. S. R., DA SILVA, E. A. B., e LIMA NETTO, S. Processamento Digital de Sinais: Projeto e Análise de Sistemas. 2. ed. Porto Alegre: Bookman, 2014. 976 p. ISBN 978-8582601235.
%% Experimento 1.2
fs = 10; % frequencia (Hz) de amostragem dos sinais
Ts = 1/fs; fase = 0;
time = 0:Ts:(1-Ts);
f1 = 3; % frequencia (Hz) do sinal s_1
f2 = 7; % frequencia (Hz) do sinal s_2
s_1 = cos(2*pi*f1*time+fase);
s_2 = cos(2*pi*f2*time+fase);
fsa = 1000; % frequência auxiliar de amostragem usada apenas para representação dos sinais originais
Tsa = 1/fsa;
time_aux = 0:Tsa:(1-Tsa);
figure(1);
stem(time,s_1,'ob');
hold on;
plot(time_aux, cos(2*pi*f1*time_aux+fase),'--k');
stem(time,s_2,'+r');
plot(time_aux, cos(2*pi*f2*time_aux+fase),'--m');
hold off;
legend('s_1 discreto','s_1 contínuo','s_2 discreto','s_2 contínuo')
- Revisão de Sinais e Sistemas no tempo discreto em Matlab:
- Filtragem de Sinais (Experimentos 1.3, 2.1 e 2.2)
- Consulte a documentação do Matlab sobre roots, poly, linspace, logspace, residue, residuez, pretty, latex, freqs, freqz, syms, symfun, zplane.
- Ver também o Publish para a geração automática de relatórios em html, doc, pdf, latex ou ppt. Ver também Publishing MATLAB Code.
- Ver pag. 138 a 141 de [1]
| Variação do Experimento 2.2 |
|---|
% Exemplos e Experimentos baseados no livro:
% DINIZ, P. S. R., DA SILVA, E. A. B., e LIMA NETTO, S. Processamento Digital de Sinais: Projeto e Análise de Sistemas. 2. ed. Porto Alegre: Bookman, 2014. 976 p. ISBN 978-8582601235.
%% Experimento 2.2
% Resposta em frequencia usando a função freqz
N = 1;
num = [1 0 0 0];
den = poly([0.8 0.2])
%den = [1 0.6 -0.16];
% modo 1
%[H,w]=freqz(num,den,[0:pi/100:N*pi-pi/100]);
%plot(w/pi, abs(H));
% modo 2
%[H,w]=freqz(num,den);
%plot(w/pi, abs(H));
% modo 3
%[H,w]=freqz(num, den, 'whole');
%plot(w/pi, abs(H));
% modo 4
freqz(num, den, 'whole');
figure(2);
zplane(num,den);
%% Resposta em frequencia substituindo z -> e^(jw)
syms z
Hf(z) = symfun(z^2/(z-0.2)/(z+0.8),z);
pretty(Hf)
latex(Hf)
N = 1;
w = [0:pi/100:N*pi-pi/100];
plot(w/pi,abs(Hf(exp(1i*w))))
%title(['$' latex(Hf) '$'],'interpreter','latex')
text(0.2,2,['H(z) = ' '$$' latex(Hf) '$$'],'interpreter','latex')
xlabel(['w/' '$$' '\pi' '$$'],'interpreter','latex')
|
- Consulte a documentação do Matlab sobre zeros, ones, plot, stem, subplot, filter.
- Para usar melhor a interface do Matlab leia também Execução de seções e variação de valores nos scripts, e ainda Uso de gráficos no Matlab.
- Ver pag. 65 a 71 de [1]
- Ver também PDF Documentation for MATLAB. Principalmente MATLAB Primer.
- Aula 3 (3 Ago)
- Revisão de Sinais e Sistemas no tempo discreto em Matlab:
- Filtragem de Sinais
| Variação do Experimento 3.1 |
|---|
%% Variação do Experimento 3.1 do livro:
% DINIZ, P. S. R., DA SILVA, E. A. B., e LIMA NETTO, S. Processamento Digital de Sinais: Projeto e Análise de Sistemas. 2. ed. Porto Alegre: Bookman, 2014. 976 p. ISBN 978-8582601235.
% FILE: Ex3_1.m
% Exemplificando as possiveis formas de realizar a filtragem de um sinal x(n)
clc; clear all; close all;
%% Definindo valores iniciais
Nh = 10; Nx = 20;
%Nh = 400; Nx = 10000;
x = ones(1,Nx);
% A resposta ao inpulso de um sistema h(n)
% no filtro FIR aos coeficientes b(n) = h(n)
h = [1:Nh]; b = h;
%% Filtrando o sinal e medindo tempos
% Filtragem utilizando a convolução
% NOTE: length(y) = length(x) + length(h) -1
tic; % iniciar a contagem do tempo
y1 = conv(x,h);
t(1) = toc; % terminar acontagem e mostrar tempo no console
% filtragem utilizando a equação recursiva
% NOTE: length(y) = length(x)
tic;
y2 = filter(b,1,x);
t(2) = toc;
% filtragem utilizando a equação recursiva
% aumentando o tamanho de x para que length(y3) = length(y1)
x3 = [x zeros(1,length(h)-1)];
tic;
y3 = filter(h,1,x3);
t(3) = toc;
length_y = length(x) + length(h) - 1;
% filtragem utilizando a FFT
% a y = IFFT(FFT(x)*FFT(h))
tic;
X = fft(x,length_y);
H = fft(h,length_y);
Y4 = X.*H;
y4 = ifft(Y4);
t(4) = toc;
% filtragem utilizando a função fftfilt
% a y = IFFT(FFT(x)*FFT(h))
tic
y5 = fftfilt(h,x3);
t(5) = toc;
disp('Comprimento do vetor de saída length(y)')
disp([' ' num2str([length(y1) length(y2) length(y3) length(y4) length(y5)])])
disp('Tempo usado na filtragem em micro segundos')
disp([' ' num2str(t*1e6) ' us'])
%% Plotando o gráfico
subplot(411);stem(y1);
hold on;
stem(y2,'xr');
stem(y3,'+m');
legend('y1', 'y2', 'y3')
hold off
subplot(412);stem(y1, 'ob');legend('y1')
subplot(413);stem(y2, 'xr'); hold on; stem(zeros(size(y1)),'.w');hold off; legend('y2')
subplot(414);stem(y3, '+m');legend('y3')
|
- Análise de Sinais (Experimento 3.2) - Análise de um sistema h[n] correspondente a um filtro passa-faixa, utilizando um sinal de entrada x[n] senoidal (ou um sinal r[n] de ruído branco). Análise da entrada x[n] e saída y[n] usando a fft.
| Variação do Experimento 3.2 |
|---|
%% Variação do Experimento 3.2 do livro:
% DINIZ, P. S. R., DA SILVA, E. A. B., e LIMA NETTO, S. Processamento Digital de Sinais: Projeto e Análise de Sistemas. 2. ed. Porto Alegre: Bookman, 2014. 976 p. ISBN 978-8582601235.
% FILE: Ex3_2.m
% Análise de sinais no domínio da frequência
fs = 200; % frequência de amostragem
f_sinal = 10; A_sinal = 1; % freqüência e amplitude do sinal
T = 1; % Duração do sinal
k_noise = 0.2; % Intensidade do ruído
snr = 0;
time = 0 : 1/fs : (T-1/fs);
L = length(time);
freq = time * fs/T;
% Sinal x(n) com amplitude A_sinal e frequencia de f_sinal (Hz)
x = A_sinal*sin(2*pi*f_sinal.*time);
% Adicionando um ruido com a função randn
noise = k_noise*randn(1,fs*T);
x1 = x + noise;
% Adicionando um ruido com a função awgn
x2 = awgn(x,snr);
% Obtendo o sinal no domínio da frequencia
X = abs(fft(x))/L;
X1 = abs(fft(x1))/L;
X2 = abs(fft(x2))/L;
% Obtendo os plots dos sinais no dominio do tempo e domínio da frequencia
figure(1);
subplot(211);plot(time,x, 'b', time,x1, 'g', time, x2, 'r');
legend('x(n)', 'x(n)+rand', 'x(n)awgn', 'Location','south')
xlabel('Tempo (seg)'); ylabel('Magnitude (linear)');
subplot(212);plot(freq, (abs(X)), 'b'); hold on ;plot(freq, (abs(X1)),'g');plot(freq,(abs(X2)),'r');
legend('X(f)', 'X(f)+rand', 'X(f)+awgn', 'Location','south'); hold off;
xlabel('Frequencia (Hz)'); ylabel('Magnitude (linear)');
|
- Aula 4 (7 Ago)
- Revisão de Sinais e Sistemas no tempo discreto em Matlab:
- Filtros Digitais (Experimento 2.3)
%% Experimento 2.3 - Filtros Digitais
% Exemplos e Experimentos baseados no livro:
% DINIZ, P. S. R., DA SILVA, E. A. B., e LIMA NETTO, S. Processamento Digital de Sinais: Projeto e Análise de Sistemas. 2. ed. Porto Alegre: Bookman, 2014. 976 p. ISBN 978-8582601235.
% FILE: Exp2_3.m
%% 1º filtro
p1 = 0.9*exp(1j*pi/4);
Z = [1 -1 ]'; P = [p1 p1']';
[num,den] = zp2tf(Z,P,1);
[h,w] = freqz(num,den);
figure(1); plot(w,abs(h)/max(abs(h)));
figure(2); zplane(num,den);
%% 2º filtro
z1 = exp(1j*pi/8);
z2 = exp(1j*3*pi/8);
p1 = 0.9*exp(1j*pi/4);
Z = [1 -1 z1 z1' z2 z2']';
P = [p1 p1' p1 p1' p1 p1']';
[num,den] = zp2tf(Z,P,1);
[h,w] = freqz(num,den);
figure(1); plot(w,abs(h)/max(abs(h)));
figure(2); zplane(num,den);
%% 3º filtro
z1 = exp(1j*pi/8);
z2 = exp(1j*3*pi/8);
p1 = 0.99*exp(1j*pi/4);
p2 = 0.9*exp(1j*pi/4 - 1j*pi/30);
p3 = 0.9*exp(1j*pi/4 + 1j*pi/30);
Z = [1 -1 z1 z1' z2 z2']';
P = [p1 p1' p2 p2' p3 p3']';
[num,den] = zp2tf(Z,P,1);
[h,w] = freqz(num,den);
figure(1); plot(w,abs(h)/max(abs(h)));
figure(2); zplane(num,den);
- Exercício - Sinal DTMF com ruído
- Verifique se o Matlab está reproduzindo corretamente o som.
%% Carregando o som
clear, close, clc
load handel;
%% Reproduzindo o som
sound(y,Fs)
% Reproduzindo o som
%soundsc(y,Fs)
% Reproduzindo o som
%player = audioplayer(y, Fs);
%play(player);
- Usando o Matlab (ou Audacity) para gerar um sinal DTMF correspondente a um número N e adicionar um ruido ao sinal. Opcionalmente utilize um sinal DTMF gravado
- Utilizar uma frequência de amostragem de 8000Hz de fazer a duração do sinal igual a 2 segundos.
- Para adicionar o ruído utilize a função y = awgn(x,snr), ou y = x + nivel*randn(n).
- Observe este sinal no domínio do tempo (DT) e domínio da frequência (DF).
%% Carregando o som
clear, close, clc
[y,Fs] = audioread('DTMF_8kHz.ogg');
%% Reproduzindo o som
sound(y,Fs)
%% Visualizando o som no DT
time = [0:length(y)-1]'/Fs;
plot(time',y'); xlabel('segundos');
xlim([0 time(end)]), ylim([-1 1]);
%% Visualizando o som no DF
Nfreq = length(y);
freq = linspace(0,2*pi,Nfreq)'*Fs/pi/2;
Y = fft(y,Nfreq)/Nfreq;
plot(freq,abs(Y)); xlabel('Hertz');
xlim([0 Fs/2]);
Unidade 2
- Aula 5 (10 Ago)
- Filtros Analógicos:
- Função de transferência

- Resposta em frequência: para obter a resposta em frequência é necessário avaliar



- O projeto de filtros analógicos é realizado em 2 etapas:

- projeto de um filtro passa baixas (LP) protótipo normalizado com frequência de passagem
- transformação em frequência para o tipo de filtro (LP, HP, BP ou BS)



- Aula 6 (14 Ago)
- Análise básica de filtros analógicos com Matlab.
- Dado um sistema linear invariante no tempo, representado pela função de transferência , obter a resposta de frequência do sistema (Magnitude e Fase).


- Aula 7 e 8 (17 e 21 Ago)
- Projeto de filtros analógicos do tipo Butterworth
- A aproximação de magnitude de filtros analógicos pode ser realizado usando as aproximações de Butterworth, Chebyshev (tipo 1 ou 2) e Cauer.
- Projeto de filtros analógicos do tipo Butterworth, considerando: é a frequência de passagem do filtro LP, é a atenuação em dB na frequência de passagem, é a frequência de stopband do filtro, é a atenuação em dB na frequência de stopband, , , são as frequências de passagem e stopband do filtro protótipo.







ATENÇÃO!!!! Tinha um erro no valor de antes estava . Jessica obrigado por avisar.

- É necessário determinar a ordem do filtro:

![{\displaystyle n\geq {\frac {\log[(10^{0.1A_{s}}-1)/(10^{0.1A_{p}}-1)]}{2\log \Omega _{s}}}}](https://en.wikipedia.org/api/rest_v1/media/math/render/svg/e5f994571dbe67328273fcb9db86b5480e325a9a)
- Em seguida obter os polos do filtro:
![{\displaystyle p_{k}=\epsilon ^{(-1/n)}e^{\left[j{\frac {(2k+n-1)}{2n}}\pi \right]},k=1,2,3,...n}](https://en.wikipedia.org/api/rest_v1/media/math/render/svg/0d089a7333523020d18a5fc153299ffe65966e6d)
- Em seguida é necessário obter a função de transferência:
- , onde


- No caso de um filtro LP é necessário ainda obter a função de transferência do filtro especificado

- Ver pag. 186 a 204 de [2]
%Butterworth lowpass Responses (db)
w = 0.1:0.01:10;
H=inline('10*log10(1./(1+w.^(2*n)))','w','n');
for k = 1:1:10
semilogx(w,H(w,k)); hold on;
end
grid on
%Butterworth lowpass Responses (linear)
w = 0.1:0.01:2;
H=inline('1./(1+w.^(2*n))','w','n');
for k = 1:1:10
plot(w,H(w,k)); hold on;
end
grid on
- Aula 10 (24 Ago)
- Projeto de filtros analógicos do tipo Chebyshev I.
- Determine a ordem mínima necessária:

- Em seguida obter os polos do filtro:
- , onde
- Uso das funções buttord, butter, cheb1ord, cheby1, cheb2ord, cheby2, ellipord, ellip para o projeto de filtros analógicos com Matlab (é necessário usar o parâmetro 's').
- Ler Comparison of Analog IIR Lowpass Filters em ellip
- Uso das funções freqs, "zplane", fvtool na análise da resposta em frequência de filtros analógicos.



- Exemplos de projeto de filtro passa-baixas com frequência de passagem de 16000 rad/s com atenuação máxima de 0.3 dB, frequência de rejeição de 20000 rad/s com atenuação mínima de 20 dB; e ganho em DC de 3 dB.
%% Projeto de filtro passa-baixas usando funções do Matlab
%% Especificações do filtro
Wp =16000; Ws = 20000; Ap = 0.3; As = 20; G0= 3;
% Para analisar o filtro projetado, use fvtool(b,a) para observar plano s, resposta em magnitude, fase e atraso de grupo
%% Butterworth
[n,Wn] = buttord(Wp, Ws, Ap, As,'s')
[b,a] = butter(n,Wn, 's');
%% Chebyshev I
n = cheb1ord(Wp, Ws, Ap, As,'s')
[b,a] = cheby1(n,Ap, Wp, 's');
%% Chebyshev II
n = cheb2ord(Wp, Ws, Ap, As,'s')
[b,a] = cheby2(n,As, Ws, 's');
%% Elliptic - Cauer
[n, Wn] = ellipord(Wp, Ws, Ap, As,'s')
[b,a] = ellip(n,Ap,As, Wn, 's');
- Ver pag. 204 a 208 de [2]
- Aula 11 (28 Ago)
- Filtros Analógicos:
- Transformações de frequência de filtros analógicos
- passa-baixas () -> passa-baixas ()
- Substituição de variáveis
- Cálculo do protótipo com



- passa-baixas () -> passa-altas ()
- Substituição de variáveis
- Cálculo do protótipo com


- passa-baixas () -> passa-faixa ( e )
- Substituição de variáveis
- Cálculo do protótipo com
- onde e






- passa-baixas () -> rejeita-faixa ( e )
- Substituição de variáveis
- Cálculo do protótipo com
- onde e


- Uso das funções semilogx, semilogy,logspace, linspace.
- Ver em IIR Filter Design, Special Topics in IIR Filter Design.
- Ver pag. 208 a 218 de [2]
- Aula 12 (31 Ago)
- Exemplos de Filtros Analógicos:
- Exemplo 1: Filtro passa-baixas ( = 952Hz, = 1236 Hz, = 1 dB, = 20 dB)
- Exemplo 2: Filtro passa-baixas ( = 1236 Hz, = 952Hz, = 1 dB, = 20 dB)
- Exemplo 3: Filtro passa-baixas ( = 852Hz, = 80 Hz, = 770 Hz, = 941 Hz, = 1 dB, = 20 dB)
- NOTA:
- No calculo do filtro lembre-se de usar as frequências angulares para , , , .
- onde () é a frequência de passagem em Hz (rad/s), () é a frequência de rejeição em Hz (rad/s), () é a frequência central em Hz (rad/s), () é a largura de banda em Hz (rad/s).
- Confira os projetos dos filtros plotando as respostas em frequência dos filtros protótipo H(p) e filtro final H(s) de cada um dos exemplos.







- Aula 13 (04 Set)
- Filtros Digitais: Filtros IIR: transformações do tempo contínuo no tempo discreto
- Aula 14 (11 Set)
- Filtros Digitais: Filtros IIR:
- Ex 4.9
- Aula 15 (14 Set)
- Filtros Digitais: Filtros IIR: Uso do Matlab.
- Ver em IIR Filter Design
- Uso das funções buttord, butter, cheb1ord, cheby1, cheb2ord, cheby2, ellipord, ellip para o projeto de filtros IIR digitais (sem o parâmetro 's').
- O projeto dos filtros digitais IIR baseados na transformada bilinear no Matlab é realizada em dois passos: (1) Determinação da ordem do filtro; (2) Determinação dos coeficientes do numerador e denominador de .



Unidade 3
- Aula 16 (21 Set)
- Filtros Digitais: Filtros FIR
- Filtros de fase linear: simétricos e antisimétricos (Tipo 1, 2, 3 e 4)
- Filtros de fase linear: propriedades (respostas em frequência possíveis, distribuição dos zeros em simetria quadrantal)
- Aula 17 (25 Set)
-
- Coeficientes da série de Fourier de filtros ideias: LP, HP, BP, BS
- Passa-baixas (Low-pass)
-
- Passa-altas (High-pass)
-
- Passa-faixa (Band-pass)
-
- Rejeita-banda (Band-stop)
- Janela retangular, fenômeno de Gibbs




- Aula (28 Set, 02 e 05 Out)
-
- Projeto de FILTRO IIR
- Atividade a distância, com laboratório liberado para uso dos alunos para a realização da AE2.
- Ver pag. 249 a 256 de [2]
- Ver FIR Filter Design
- Uso de funções de janelamento temporal no projeto de filtros digitais.
- Tipos de janelas temporais usadas no projeto de filtros digitais.
- Retangular

- Bartlett

- Hanning

- Hamming

- Blackman

- em todas as janelas quando


- onde é para par e para impar




- Filtros Digitais: Filtros FIR
- Projeto de filtro FIR utilizando janelas temporais
- Uso de janelas fixas no Matlab : rect, triang, bartlett, hann, hamming, blackman, blackmanharris, nuttall.
L = 64;
wvtool(rectwin(L), triang(L), bartlett(L), hann(L), hamming(L), blackman(L), blackmanharris(L), nuttallwin(L));
- Tabela 5.1
| Janela | |||
|---|---|---|---|
| Retangular | 13.3 | 20.33 | 0.92/M |
| Triangular | 26.6 | 27.41 | |
| Bartlett | 26.5 | 27.48 | |
| Hann | 31.5 | 44.03 | 3.11/M |
| Bartlett-Hanning | 35.9 | 40.77 | |
| Hamming | 42.5 | 54.08 | 3.32/M |
| Bohman | 46.0 | 51.84 | 7.01/M |
| Parzen | 53.1 | 56.89 | |
| Backman | 58.1 | 75.25 | 5.56/M |
| Flat Top | 88.0 | 106.3 | |
| Backman-Harris | 92.1 | 108.8 | |
| Nutfall | 93.8 | 109.7 |



- Dados acima obtidos para um filtro passa baixas de ordem N = 64 com
- Ver pag. 256 a 265 de [2]
- Ver artigos:
- A new window and comparison to standard windows Yeong Ho Ha ; Pearce, J.A. IEEE Transactions on Acoustics, Speech, and Signal Processing, Feb. 1989, Vol.37(2), pp.298-301.
- Some windows with very good sidelobe behavior Nuttall, A. IEEE Transactions on Acoustics, Speech, and Signal Processing, February 1981, Vol.29(1), pp.84-91

- Aula 19 e 20 (16 e 19 Out)
- Filtros Digitais: Filtros FIR:
- Projeto de filtro FIR utilizando janelas temporais fixas.
- Exemplo de projeto
Projetar um filtro passa baixas usando uma janela temporal fixa (verificar a janela que atende a especificação) wp = 0.2*pi; Ap = 0.2 dB; Gp = 0 dB ws = 0.3*pi; As = 60 dB;
- Informar qual o tipo de janela, a ordem obtida, e o valor de wc do projeto final
- Exemplo de projeto
Projetar um filtro LP usando uma janela temporal fixa (hamming, bartlett-hanning, hanning). wp = 0.4*pi; Ap = 1 dB; Gp = 0 dB ws = 0.6*pi; As = 40 dB;
- Comparar os 3 tipos de janela, a ordem obtida, e o valor de wc em cada projeto.
- Use como uma estimativa inicial os valores da Tabela 5.1 pag. 268.
- PASSO 1 - Escolher o tipo de janela de acordo com a atenuação do lóbulo lateral Asl e As.
- PASSO 2 - Estimar a ordem N1 do filtro considerando os parâmetros Dw
- PASSO 3 - Calcule os coeficientes clp do filtro LP , calcule os valores da janela w e obtenha a resposta ao impulso do filtro h = clp * w.
- PASSO 4 - Verifique o valor real de Dwr = wAs-wAp, e faça a correção da ordem do filtro em função do desvio constatado. N2 = N*Dwr/Dw.
- PASSO 5 - Corrija o valor de projeto dos coeficientes Clp do filtro ideal, a janela e a resposta ao impulso.
- Repita o PASSO 3 até 5, até obter um filtro que atenda as especificações de Dw.
- PASSO 6 - Desloque a frequência de corte wc de modo a obter o valor correto de wp. wc2 = wp + (wp-wAp).
- Projeto de filtro FIR.
- Projete os dois filtros projetados anteriormente como IIR, utilizando 3 janelas diferentes. Compare os filtros obtidos com os filtros IIR.
- Use como uma estimativa inicial os valores da Tabela 5.1 pag. 268.
- Aula 21 (23 Out)
- Filtros Digitais: Filtros FIR
- Projeto de filtro FIR utilizando janelas temporais ajustáveis
L = 64;
r = 60; % Chebyshev e Tukey
alpha = 3; % Gauss
betha = 8; % Kaiser
nbar = 10; % Taylor
wvtool(kaiser(L,betha), chebwin(L,r), gausswin(L,alpha),tukeywin(L,r), taylorwin(L,nbar,-r));
Para a janela de Kaiser, a estimação do fator e da ordem do filtro são obtidos por:



- onde é a atenuação do lóbulo lateral e é a largura da banda de transição em rad/amostra.

Utilizando o Matlab é possível estimar esses valores utilizando a função kaiserord. Exemplo da obtenção de um filtro passa baixa com , , atenuação de 40 dB na "stopband"



fsamp = 8000;
fcuts = [1000 1500];
mags = [1 0];
devs = [0.01 0.01];
[n,Wn,beta,ftype] = kaiserord(fcuts,mags,devs,fsamp);
Com os parâmetros é possível projetar o filtro usando a função fir1, que utiliza o método da janela para o projeto do filtro.
h_fir = fir1(n,Wn,ftype,kaiser(n+1,beta),'noscale');
[Hw,w] =freqz(h_fir);
plot(w*fsamp/2/pi,20*log10(abs(Hw)))
title(['Kaiser filter N = ' num2str(n)])
%fvtool(h_fir,1)
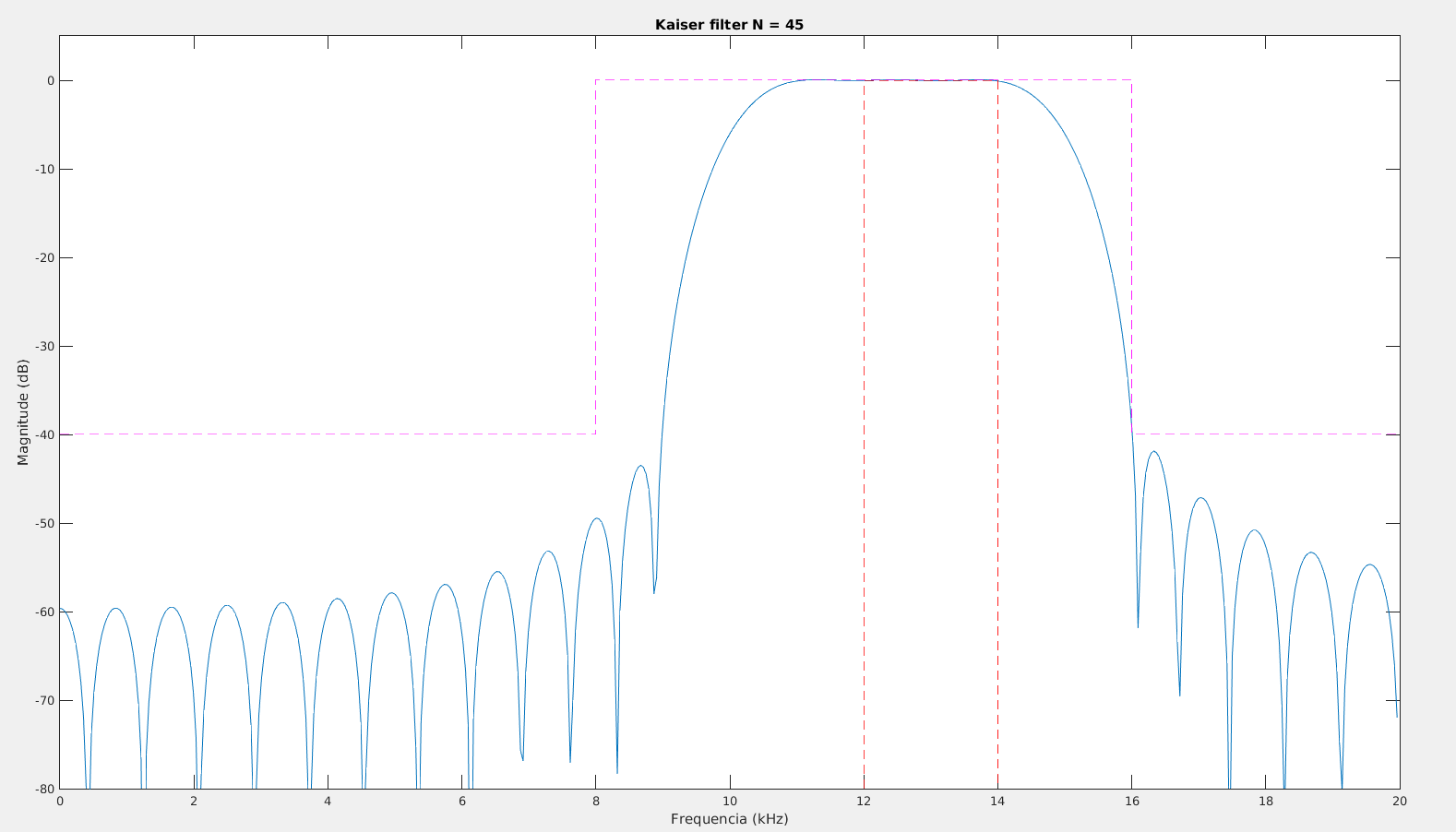
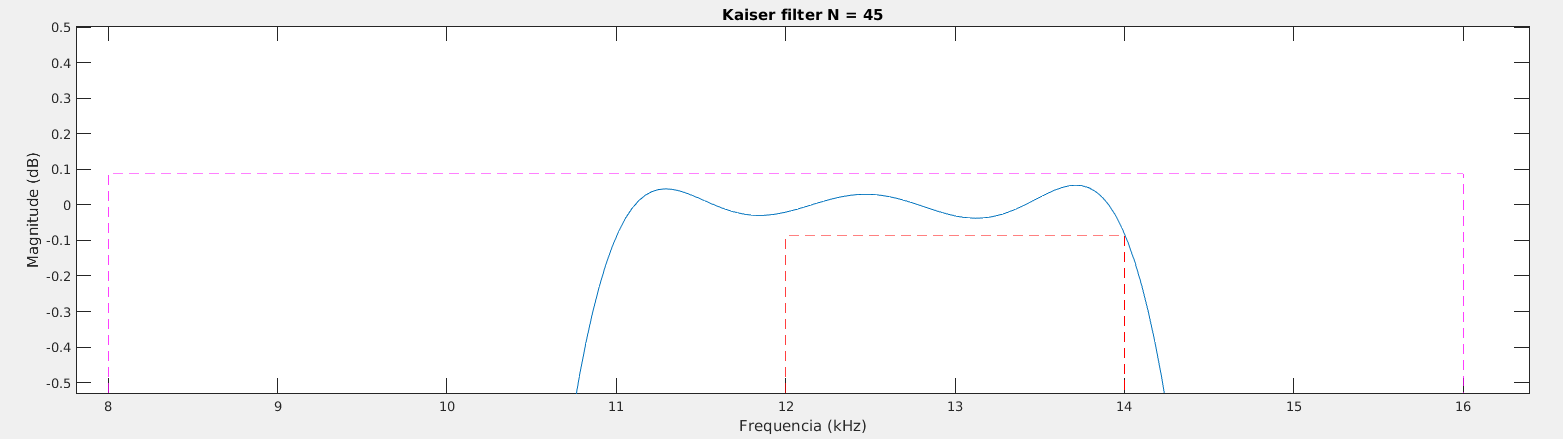
- Aula 22 (26 Out)
- Filtros Digitais: Filtros FIR
%% Exemplo de Filtro
wp1 = 0.1 \pi;
ws1 = 0.2 \pi;
ws2 = 0.6 \pi;
wp2 = 0.8 \pi;
Ap = 1 dB;
Ar = 40 dB;
</syntaxhighlight>
- Filtro de Parks-McClellan. Funções firpm e firpmord.
- Remez exchange algorithm - o básico em Wolfram Alpha
- Remez exchange algorithm - o detalhe com implementação em Matlab. Como resolver as anomalias na banda de transição.
- [1]
- Aula 23 (30 Out)
%% Exemplo de Filtro
fp = 3000 Hz;
fr = 4000 Hz;
fs = 20000 Hz;
Ap = 1 dB;
Ar = 40 dB;
Unidade 4
- Aula 24 (6 Nov)
- Realização de Filtros
- Realização de filtros FIR: Forma Direta.
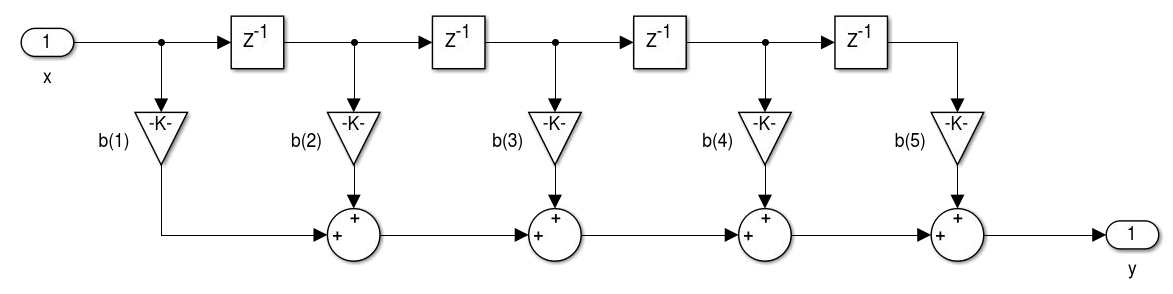

Figura 1 - Realização de filtros FIR na Forma Direta - Realização de filtros FIR: Forma Transposta. A transposição consiste na inversão do fluxo de todos os sinais, substituição de nós de soma por derivações e as derivações por soma. A entrada e saída também devem ser invertidas. A realização da transposição não altera o sistema implementado.
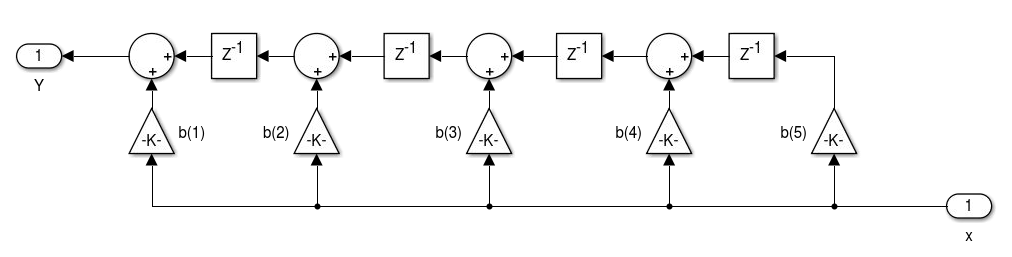

Figura 2 - Realização de filtros FIR na Forma Transposta 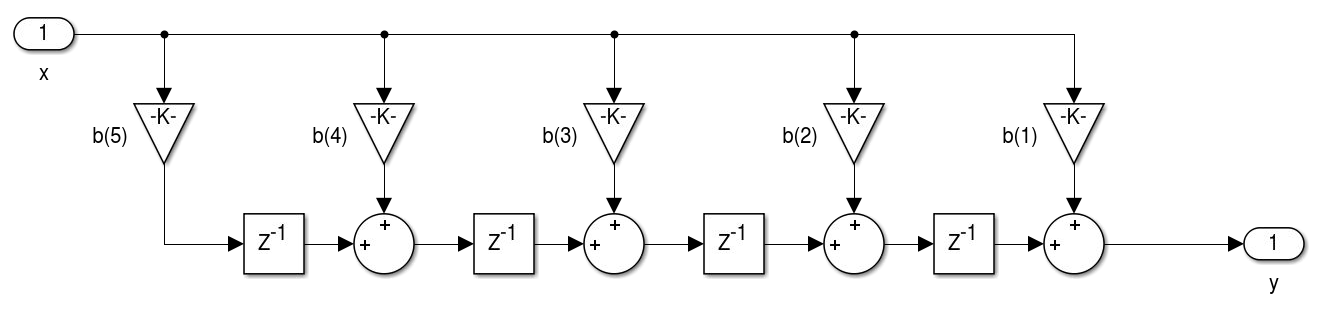

Figura 3 - Realização de filtros FIR na Forma Transposta - Realização de filtros FIR de fase linear: simétrico tipo I e II e antissimétrico tipo III e IV.
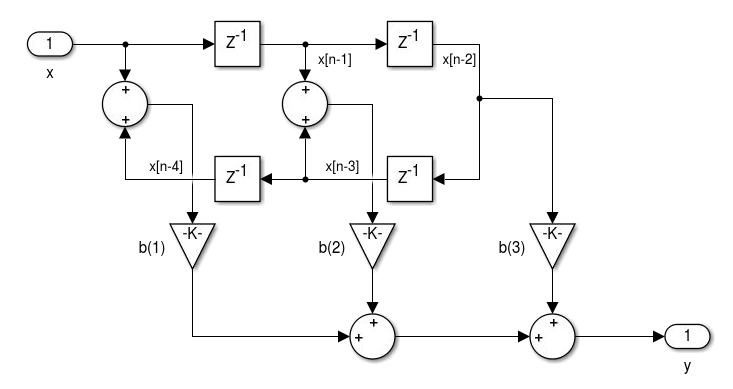

Figura 4 - Realização de filtros FIR de fase linear Simétrico I 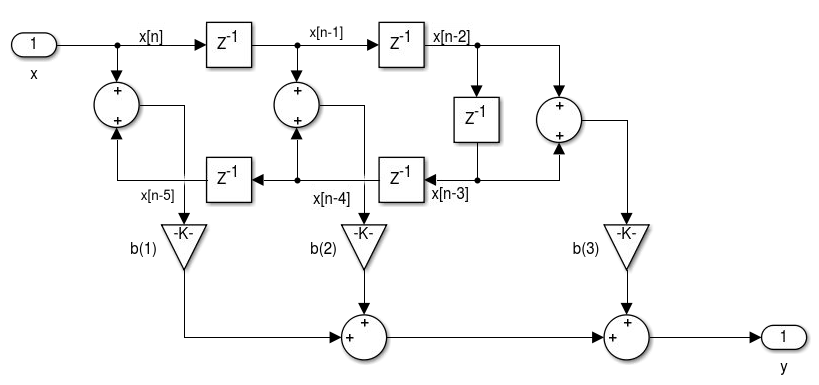

Figura 5 - Realização de filtros FIR de fase linear Simétrico II 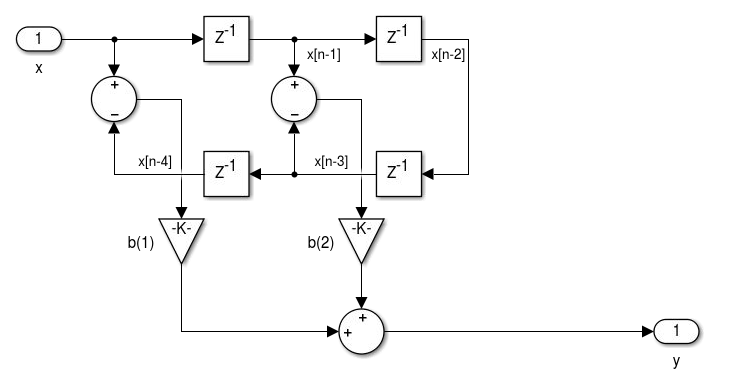

Figura 6 - Realização de filtros FIR de fase linear Antisimétrico III 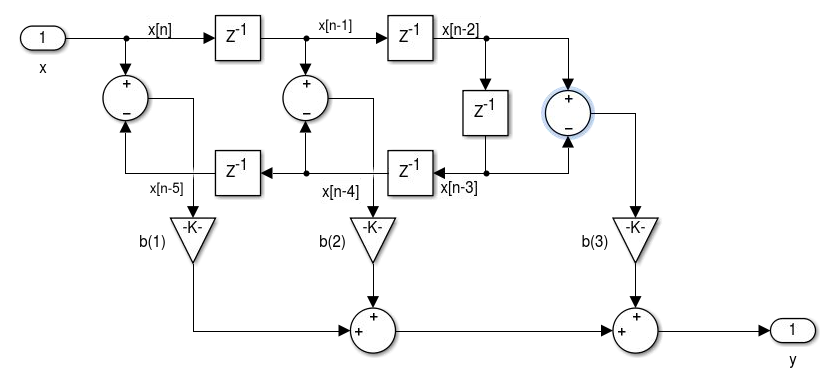

Figura 7 - Realização de filtros FIR de fase linear Antisimétrico IV - Realização de Filtros FIR usando o FDATool
- Estudar estrutura de filtros disrcetos FIR no Matlab, Filter Realization Wizard - Reference, Filter Realization Wizard - User Guide.
- Ver pag. 303 a 312 de [2].
- Aula 27 (9 Nov)
-
- Realização de Filtros usando o comando realizemdl do MatLab
Fs = 30000; % Sampling Frequency
Fpass = 12000; % Passband Frequency
Fstop = 13000; % Stopband Frequency
Dpass = 0.01; % Passband Ripple
Dstop = 0.01; % Stopband Attenuation
flag = 'scale'; % Sampling Flag
% Calculate the order from the parameters using KAISERORD.
[N,Wn,BETA,TYPE] = kaiserord([Fpass Fstop]/(Fs/2), [1 0], [Dstop Dpass]);
% Calculate the coefficients using the FIR1 function.
b = fir1(N, Wn, TYPE, kaiser(N+1, BETA), flag);
hFIR = dsp.FIRFilter;
hFIR.Numerator = b;
% Para definir diretamente os coeficientes
realizemdl(hFIR)
% Para definir os coeficientes através de uma matriz de entrada
realizemdl(hFIR,'MapCoeffsToPorts','on');
- Realização de filtros FIR: Cascata, Polifase
- Vantagens do uso de filtro Polifase:
- 1) Quando o sinal será subamostrado (downsampling) de "D" amostras após a filtragem, a complexidade da implementação é reduzida de "D" vezes, pois apenas uma das "fases" precisa ser implementada.
- 2) Para reduzir o harware a ser implementado, é possível implementar apenas uma das "fases" do filtro e trocar "D" vezes os coeficientes.
ATUAL
- Aula 28 (13 Nov)
-
- Realização de filtros IIR de 2ª ordem: Forma Direta I e II, e Forma Transposta I e II.
-
- Separando H(z) em dois blocos , e obtendo o sinal intermediário W(z) ou Y(z) dependendo da ordem dos blocos.


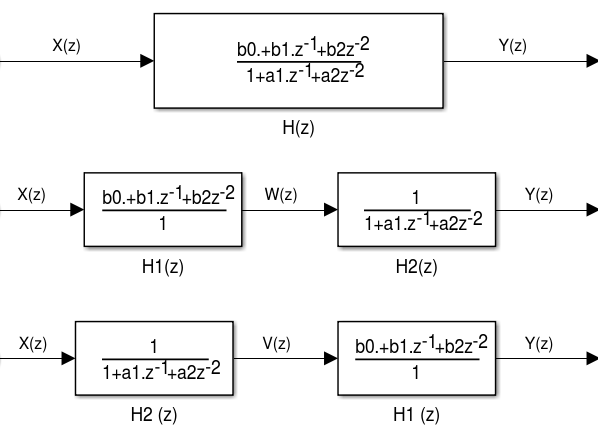

Figura 7 - Separação do filtro IIR H(z) em H1(z) e H2(z) - Com o ordenamento dos blocos e em ordem direta teremos a Forma Direta I:
- Podemos obter a realização de na forma direta.
- Para obter a realização de , é necessário reescrever a saída em função de e das saídas anteriores e :












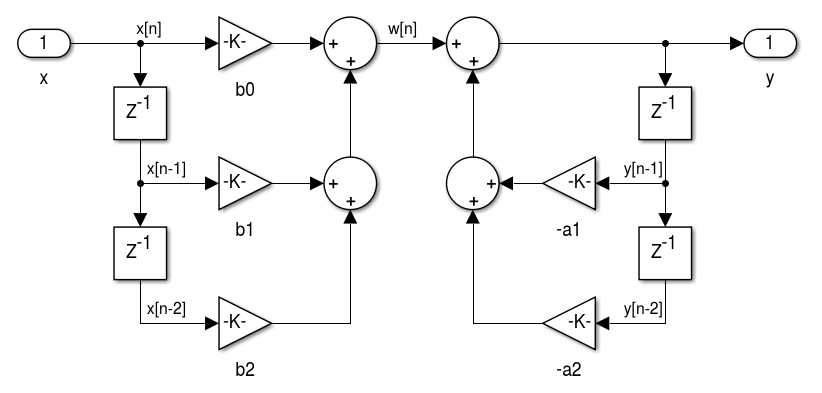

Figura 8 - Realização de filtros IIR na Forma Direta I - Com o ordenamento dos blocos e em ordem reversa teremos a Forma Direta II:




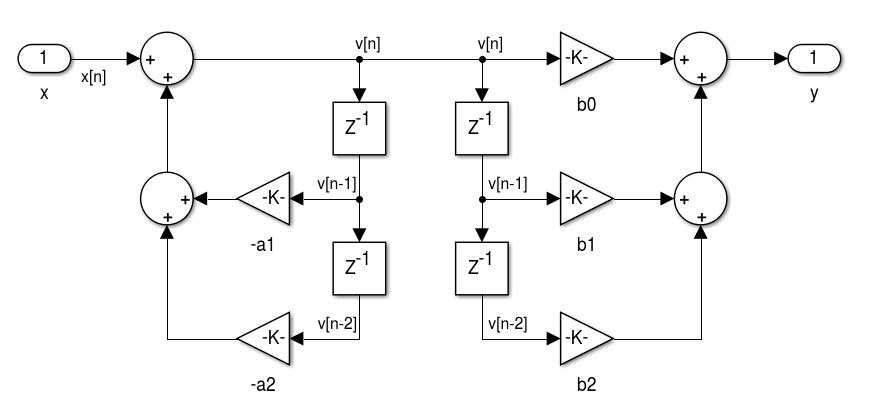

Figura 9 - Realização de filtros IIR na Forma Direta II - Considerando que os sinais no centro são idênticos podemos simplificar e obter a Forma Direta II (Canônica):
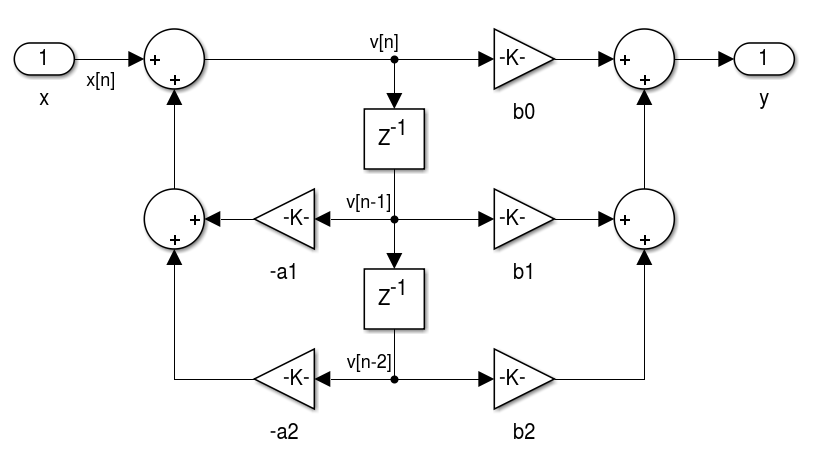

Figura 10 - Realização de filtros IIR na Forma Direta II Canônica - Considerando as regras de transposição podemos obter a forma transposta I e II. A transposição consiste na inversão do fluxo de todos os sinais, substituição de nós de soma por derivações e as derivações por soma. A entrada e saída também devem ser invertidas. A realização da transposição não altera o sistema implementado.
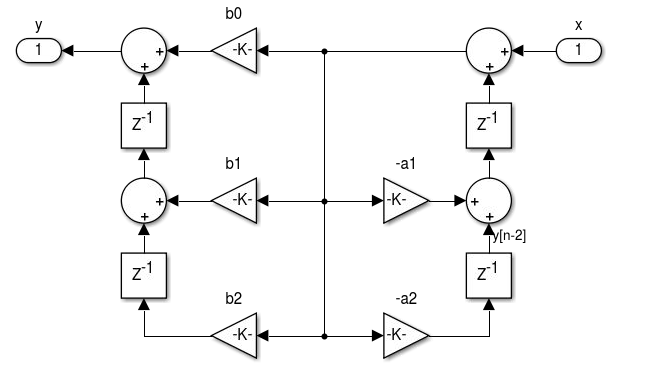

Figura 11 - Realização de filtros IIR na Forma Transposta I 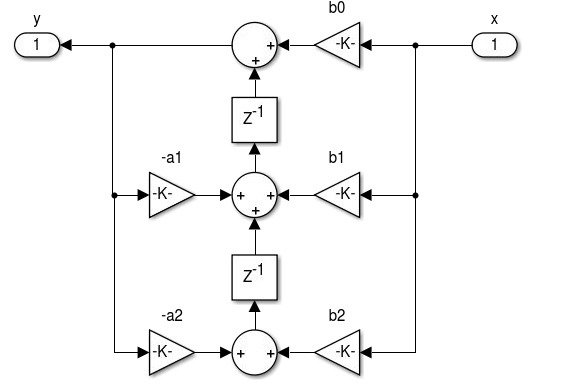

Figura 12 - Realização de filtros IIR na Forma Transposta II - Realização de filtros IIR de ordem maior que 2: Forma Direta I e II, Transposta I e II, Cascata, Paralela
- Os filtros IIR de ordem superior a 2 podem ser implementados nas FD I ou II e na FT I ou II. No entanto nessa configuração tendem a ficar instáveis ao terem os coeficientes quantizados, e também terem uma significativa alteração da resposta em frequência. Para reduzir esses problemas uma possível solução é a decomposição em filtros de 2ª ordem para serem associados na forma em Cascata ou Paralela.
- Filtros Digitais: Ferramentas do Matlab para projeto
- Practical Introduction to Digital Filter Design
- Filter Design Gallery
- Função para projeto de filtros - designfilt
Avaliações
- Entrega dos diversas Atividades Extraclasse ao longo do semestre.
- Entrega do Projeto Final. O projeto é avaliado nos quesitos:
- 1) Implementação do Sistema,
- 2) Documentação,
- 3) Avaliação Global do aluno no projeto.
- Entrega dos Atividades Extraclasse ao longo do semestre AE1 a AE(N). A entrega, detalhes e prazos de cada AE serão indicados na plataforma Moodle
- Autoinscrição na Plataforma Moodle de PSD29007 (engtelecom)
AE1 - Revisão de Sinais e Sistemas (prazo e forma de entrega ver na plataforma Moodle)
- ATIVIDADE 1 - Experimento 3.1
- Utilizando Nh = 10 e Nx = 20, execute a filtragem pelo menos 3 vezes em seguida e anote os tempos.
- Anote o tamanho dos sinais de saída y, e analise os plots.
- Aumente o tamanho do filtro (Nh) e o tamanho do sinal de entrada (Nx) e execute a filtragem pelo menos 3 vezes em seguida e anote os tempos.
- Anote o tamanho dos sinais de saída y.
- Explique os resultados obtidos.
- ATIVIDADE 2 - Experimento 3.2
- Acrescente um subplot para mostrar o sinal no domínio da frequência com a magnitude em dB 20*log10(abs(X)).
- Limite a escala da magnitude entre -100 e 1 dB usando ylim.
- Insira em todos os plots e subplot, títulos, legendas e labels para os eixos X e Y,
- Posicione o texto "F Hz" para indicar o pico nos gráficos 2 e 3, conforme mostrado na figura abaixo.
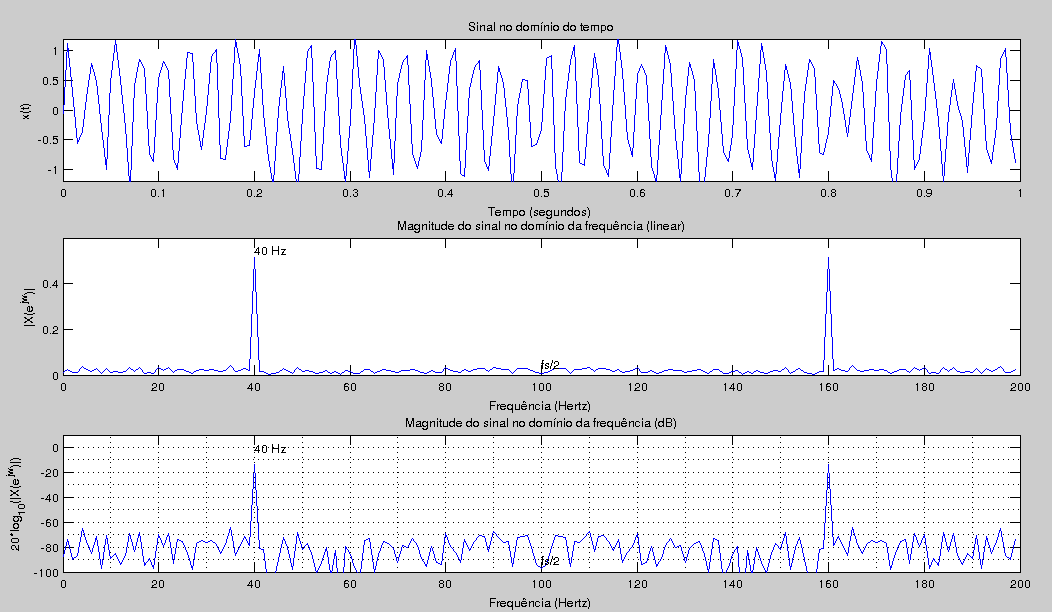
Figura 1 - Análise no domínio da frequência do sinal
- Varie o valor de k entre 0 e 2 (com passo de 0.1) e analise o sinal no domínio do tempo e no domínio da frequência.
- Varie o valor de snr entre 100 e 1 e analise o sinal no domínio do tempo e no domínio da frequência.
- Utilize k = 0.3 e snr = 40 e varia a frequência do sinal entre 0 até 200 Hz (com passo de 10 Hz). Interprete os resultados obtidos.
- ATIVIDADE 3 - Experimento 1.2 + 3.2
- Utilizando o espectro de frequência (Exp3.2) repita as medições feitas com o processo de amostragem (Experimento 1.2)
- Varie o valor da frequência de amostragem de 6 até 20 Hz e observe
- Para analisar o espectro talvez seja conveniente mudar a amplitude dos sinais de entrada (sugestão A1 = 0.3 e A2 = 0.8).
- Em qual frequência deixa de ocorrer recobrimento do sinal 2.
- Qual conclusão que você chega em relação a amostragem de sinais utilizando para a frequência de amostragem valores acima e abaixo do dobro da frequencia de Nyquist.
- ATIVIDADE 4 - Filtragem de sinal DTMF
- Usando o Matlab (ou Audacity) gere um sinal DTMF correspondente a um número N (ver tabela abaixo), com duração de 2 segundos, com frequência de amostragem de 4kHz.
- Use o Matlab para ouvir o sinal x[n], mostrar o sinal no domínio do tempo e frequência.
- Use um filtro passa-faixa que permita a passagem apenas da frequência da linha (ou coluna) y[n]. Faça a filtragem no domínio do tempo, usando a função filter. Para projetar o filtro, posicionando no mínimo um polo sobre a frequência que deseja passar, e um zero sobre a frequência que deseja rejeitar.
- Use o Matlab para ouvir o sinal x[n], mostrar o sinal no domínio do tempo e frequência.
- VER os experimentos 3.1, 3.2 e 2.3 para códigos de auxilio.
Aluno
Tecla
Fernando
1
Gabriel
6
Jessica
0
João
3
Leticia
9
Marcos
5
Pedro
8
Vitor
2
- Enviar o relatório (em pdf) incluindo as principais figuras obtidas e as respostas e conclusões na plataforma Moodle.
- Para a geração de documentação/relatórios técnicos/artigos, está disponibilizada a Plataforma Sharelatex. Utilize preferencialmente o modelo de artigo no padrão ABNT em 1 coluna. Se quiser pode utilizar o publish do matlab mas entregue o documento em pdf, com as respostas solicitadas e as conclusões de cada Atividade.


AE2 - Projeto de Filtros Digitais IIR (Entrega e prazos ver Moodle)
Esta avaliação visa verificar se você conhece a metodologia de projeto de filtros digitais IIR: (a) projeto de um filtro protótipo analógico passa-baixas H(p); (b) transformação em frequência do filtro H(p) -> H(s), obtendo o filtro LP, HP, BP, BS, conforme o tipo de filtro desejado; (c) transformação do filtro analógico em filtro digital H(s) -> H(z) utilizando a transformação "Bilinear" ou pela transformação "Invariante ao Impulso". Nesta avaliação é solicitado que cada equipe realize o projeto de 5 filtros, e trabalhos individuais serão 4 filtros. Para todos os filtros considere como valores default fa = 4 kHz, Gp = 0 dB, Ap = 1 dB e As = 40 dB (exceto se indica outro valor na tabela abaixo. Os filtro BP deverão ter apenas o BP1 projetado conforme o procedimento completo, sendo que nos demais deverá ser aproveitado o filtro H(p) para obtê-los.
Equipe
Filtro 1
Filtro 2
Filtro 3
Filtro 4
Filtro 5
Equipe 1
LP - (f1 = 941 Hz; f2 = 1209 Hz, As = 20 dB, Butterworth)
HP - (f1 = 941 Hz; f2 = 1209 Hz, As = 30 dB, Chebychev 1)
BP1 - (f1 = 627 Hz; f2 = 683 Hz, f3 = 711 Hz; f4 = 767 Hz, Elíptico )
BP2 - (f1 = 693 Hz; f2 = 755 Hz, f3 = 785 Hz; f4 = 847 Hz, Elíptico )
BP3 - (f1 = 1202 Hz; f2 = 1309 Hz, f3 = 1363 Hz; f4 = 1470 Hz, Elíptico )
Equipe 2
LP - (f1 = 941 Hz; f2 = 1209 Hz, As = 25 dB, Chebychev 1)
HP - (f1 = 941 Hz; f2 = 1209 Hz, As = 25 dB, Butterworth)
BP1 - (f1 = 847 Hz; f2 = 922 Hz, f3 = 960 Hz; f4 = 1035 Hz, Chebychev 2 )
BP2 - (f1 = 1329 Hz; f2 = 1447Hz, f3 = 1507 Hz; f4 = 1625 Hz, Chebychev 2 )
BP3 - (f1 = 1470 Hz; f2 = 1600 Hz, f3 = 1666 Hz; f4 = 1796 Hz, Chebychev 2 )
Equipe 3
LP - (f1 = 941 Hz; f2 = 1209 Hz, As = 30 dB, Chebychev 1)
HP - (f1 = 941 Hz; f2 = 1209 Hz, As = 20 dB, Butterworth)
BP1 - (f1 = 767 Hz; f2 = 835 Hz, f3 = 869 Hz; f4 = 937 Hz, Elíptico )
BP2 - (f1 = 693 Hz; f2 = 755 Hz, f3 = 785 Hz; f4 = 847 Hz, Elíptico )
BP3 - (f1 = 1329 Hz; f2 = 1447Hz, f3 = 1507 Hz; f4 = 1625 Hz, Elíptico )
Equipe 4
LP - (f1 = 941 Hz; f2 = 1209 Hz, As = 25 dB, Butterworth)
HP - (f1 = 941 Hz; f2 = 1209 Hz, As = 35 dB, Chebychev 1)
BP1 - (f1 = 1088 Hz; f2 = 1185 Hz, f3 = 1233 Hz; f4 = 1330 Hz, Chebychev 2 )
BP2 - (f1 = 1329 Hz; f2 = 1447Hz, f3 = 1507 Hz; f4 = 1625 Hz, Chebychev 2 )
BP3 - (f1 = 627 Hz; f2 = 683 Hz, f3 = 711 Hz; f4 = 767 Hz, Chebychev 2 )
Equipe 5
LP - (f1 = 941 Hz; f2 = 1209 Hz, As = 35 dB, Chebychev 1)
HP - (f1 = 941 Hz; f2 = 1209 Hz, As = 25 dB, Butterworth)
BP1 - (f1 = 693 Hz; f2 = 755 Hz, f3 = 785 Hz; f4 = 847 Hz, Elíptico )
BP2 - (f1 = 1202 Hz; f2 = 1309 Hz, f3 = 1363 Hz; f4 = 1470 Hz, Elíptico )
- onde:
- LP (Low Pass)- Passa Baixa, HP (High Pass)- Passa Altas, BP (Band Pass)- Passa Faixa, BS (Band Stop)- Rejeita Faixa
- - são as "N" frequência de especificação do filtro dadas em Hertz (kHz ou MHz); f_a é a frequência de amostragem dos sinais e do sistema.
- - frequência de passagem; - frequência de rejeição, - Atenuação máxima na banda de passagem (dB), - Atenuação mínima na banda de rejeição (dB), - Ganho médio na banda de passagem (dB).
- Os filtros LP e HP devem ser realizados utilizando a aproximação de Butterworth ou Chebyshev tipo 1 (devendo ser todos os calculados efetuados a partir das equações), enquanto os filtros BP devem ser realizados utilizando a aproximação de Chebyshev tipo 2 ou Euler (podendo ser calculada a função H(p) a partir das funções do Matlab.
- A tabela acima indica o tipo de filtro que cada equipe deve utilizar
- Para ambos filtros deve indicada a ordem do filtro, o valor de polos e zeros, e as equações de H(p), H(s), H(z).
- Deve ser apresentado de forma gráfica a resposta em frequência dos filtros (ganho em dB e fase) dos filtros (a) protótipo H(p), (b) Filtro analógico H(s) e Filtro digital H(z). Para mostrar que os filtros atendem a especificação utilize uma mascara com as especificações.
- No caso do filtro H(z) também deve ser mostrado o atraso de grupo (ver função grpdelay do Matlab)
- Apresente o diagrama dos pólos e zeros dos filtros H(p), H(s) e H(z)
- Utilize a mesma escala em dB para os 3 gráficos de cada filtro. Nas abcissas utilize uma escala em Hz (kHz ou MHz). Utilize uma mascara com cor diferenciada para indicar claramente a especificação do filtro, e crie um segundo gráfico mostrando claramente a banda de passagem conforme ilustrado nas figuras abaixo:
- Escreva um relatório técnico em PDF mostrando os resultados obtidos e comentando os resultados obtidos. Não é necessário apresentar a teoria utilizado para o projeto, mas todos os cálculos e metodologia utilizada devem estar documentados.
- Envie o relatório em pdf e os arquivos ".m" utilizados na plataforma Moodle.




ATUAL
AE3 - Projeto de Filtros Digitais FIR (Entrega e prazos ver Moodle)
Esta avaliação visa verificar se você conhece a metodologia de projeto de filtros digitais FIR: (a) Projeto de filtros com Janela Fixas e Ajustáveis; (b) Projeto de filtros com o algoritmo de Parks-McCleallan; Nesta avaliação é solicitado que cada equipe realize os mesmos filtros projeto de filtros da atividade AE2.
- Para todos filtros deve indicada a ordem do filtro, o valor de polos e zeros. Procure obter em cada caso a menor ordem que possibilite ter uma resposta de frequência que atende a sua especificação.
- Deve ser apresentado de forma gráfica a resposta em frequência dos filtros (ganho em dB e fase e atraso de grupo) dos Filtro digital H(z).
- Apresente o diagrama dos pólos e zeros do filtro H(z)
- Utilize a mesma escala em dB para os filtros. Nas abcissas utilize uma escala em Hz (kHz ou MHz). Utilize uma mascara com cor diferenciada para indicar claramente a especificação do filtro, e crie um segundo gráfico mostrando claramente a banda de passagem conforme ilustrado nas figuras da atividade AE2.
- Escreva um relatório técnico em PDF mostrando os resultados obtidos e comentando os resultados obtidos. Não é necessário apresentar a teoria utilizado para o projeto, mas todos os cálculos e metodologia utilizada devem estar documentados.
- Envie o relatório em pdf e os arquivos ".m" utilizados na plataforma moodle.
Referências Bibliográficas
- ↑ 1,0 1,1 1,2 1,3 DINIZ, P. S. R., DA SILVA, E. A. B., e LIMA NETTO, S. Processamento Digital de Sinais: Projeto e Análise de Sistemas. 2. ed. Porto Alegre: Bookman, 2014. 976 p. ISBN 978-8582601235
- ↑ 2,0 2,1 2,2 2,3 2,4 2,5 2,6 2,7 2,8 SHENOI, B. A. Introduction to Digital Signal Processing and Filter Design. 1.ed. New Jersey: John Wiley-Interscience, 2006. 440 p. ISBN 978-0471464822
- ↑ LATHI, Bhagwandas P. Sinais e Sistemas Lineares. 2. ed. Porto Alegre: Artmed-Bookman, 2007. 856 p. ISBN 978-8560031139