|
|
| Linha 31: |
Linha 31: |
| | ===Testes Funcionais=== | | ===Testes Funcionais=== |
| | {{Collapse top |Primeiro teste funcional}} | | {{Collapse top |Primeiro teste funcional}} |
| − | {{Collapse bottom}}
| |
| − |
| |
| − | ==Requisitos não funcionais==
| |
| − |
| |
| − | '''RNF01 A interface do sistema de comunicação com o usuário deve ser intuitiva.'''
| |
| − |
| |
| − | Terminal? interface web?
| |
| − |
| |
| − | '''RNF02 O tabuleiro será composto por linhas pretas e todos com cor.'''
| |
| − |
| |
| − | Não entendi, o caminho será na cor preta e outras cores será o que?
| |
| − |
| |
| − | '''RNF03 O tabuleiro terá as dimensões definidas (2m x 2m).'''
| |
| − |
| |
| − | OK
| |
| − |
| |
| − | '''RNF04 O tabuleiro será composto por 100 quadrados de dimensões: 20cm x 20cm.'''
| |
| − |
| |
| − | OK
| |
| − |
| |
| − | '''RNF05 O tabuleiro será limitado por uma borda vermelha.'''
| |
| − |
| |
| − | OK, linha vermelha não pode ser tratada como obstáculo, mas robô não pode transpo-la.
| |
| − |
| |
| − | '''RNF06 O placar mostrado aos usuários deve ser de fácil identificação.'''
| |
| − |
| |
| − | Será implementado na interface de monitoramento.
| |
| − |
| |
| − | '''RNF07 O robô deve ter uma cor para identificação.'''
| |
| − |
| |
| − | Essa cor será sorteada? ou o robô designa no cadastro, junto com outros dados?
| |
| − |
| |
| − |
| |
| − |
| |
| | {{Collapse bottom}} | | {{Collapse bottom}} |
| | | | |
Edição das 21h06min de 19 de agosto de 2018
Responsáveis pelo projeto
- Douglas Amorim dos Santos
| Diário de bordo
|
|
Data estelar 3 4 do 3 do 2 do 1
|
Detalhes iniciais
Conexão ao EV3
Efetuamos a conexão ao ev3 por meio do bluetooth, seguindo as instruções descritas em https://www.ev3dev.org/docs/tutorials/using-bluetooth-tethering/. Após conectarmos via bluetooth acessamos o ev3 via ssh utilizando o putty.
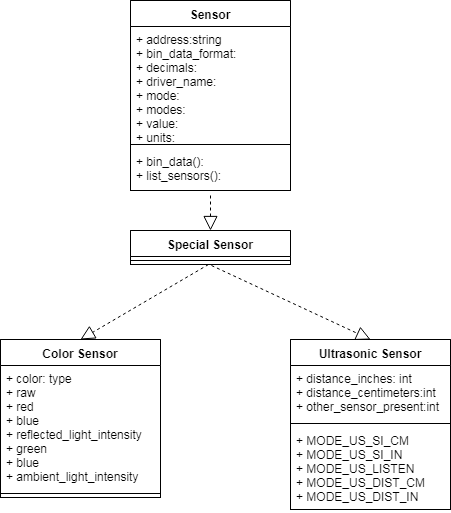
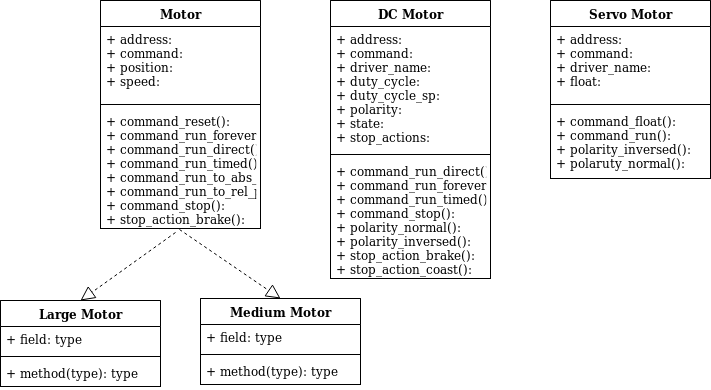
Diagramas de Classe
| Classe sensor
|
|
|
| Classe motor
|
|
|
Requisitos
| Requisitos funcionais e não Funcionais
|
|
|
Testes Funcionais
Sistema Robo
| Atores do Sitema robo
|
- SS: Sistema supervisor responsável por indicar ações que serão realizados no robô, coletar informações de localização e validar ou não as caças.
- Sensor de Luz: É responsável por informar ao robô o caminho que deve ser seguido e onde exite pontos de intersecções.
- Sensor ultrassom: Responsável por verificar e avisar o robô a existência da presença de um outro robô no tabuleiro.
|


