De MediaWiki do Campus São José
Ir para navegação
Ir para pesquisar
1 Responsáveis pelo projeto
- Alisson Boeing, e-mail: alisson.b11@aluno.ifsc.edu.br
- Rafael Teles E, e-mail: rafatespindola@gmail.com
| SR
|
| SS
|
2 Diagrama dos casos de uso SR
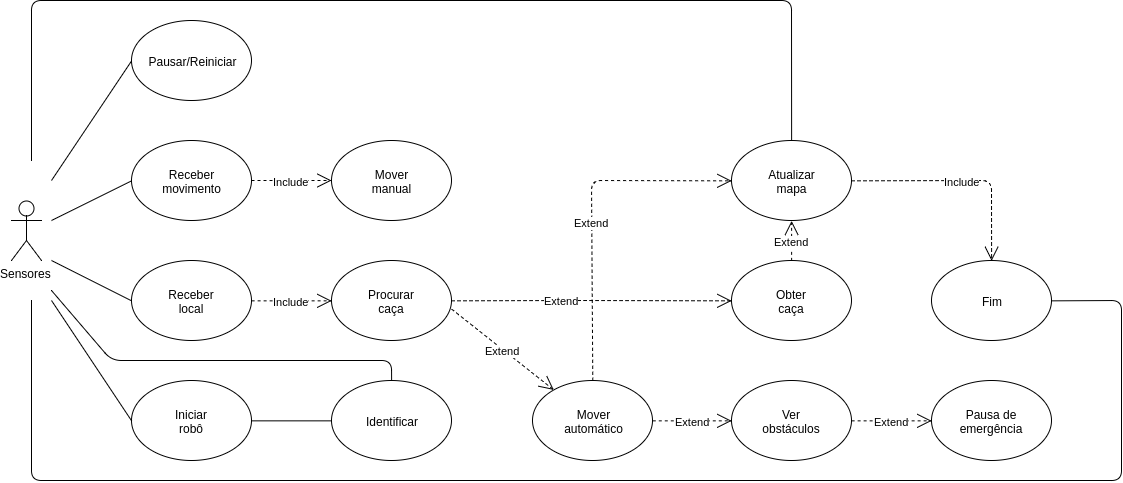
3 Descrição dos casos de uso SR
Caso de uso: Iniciar robô <br\>
Ator Primário: SS <br\>
Identificador: INC-RB <br\>
Sumário: SS informa ao SR seu ID, sua Cor, Modo de jogo e Posição inicial <br\>
Pré condições: Conexão já estabelecida entre SS e SR<br\>
Fluxo Principal: <br\>
[1] SS informa ao SR seu ID <br\>
[2] SS informa ao SR sua Cor <br\>
[3] SS informa ao SR Modo de jogo <br\>
[4] SS informa ao SR sua Posição inicial <br\>
Caso de uso: Receber movimento <br\>
Ator Primário: SS <br\>
Identificador: RCB-MV <br\>
Sumário: SR recebe os comandos de movimentos de SS <br\>
Pré condições: Estar no modo manual e já ter executado INC-RB <br\>
Fluxo Principal: <br\>
[1] SS envia os comandos de movimento para SR <br\>
Caso de uso: Mover manual <br\>
Ator Primário: SS <br\>
Identificador: MVR-MN <br\>
Sumário: Executar o movimento recebido <br\>
Pré condições: Já ter executado RCB-MV <br\>
Fluxo Principal: <br\>
[1] SS envia os comandos para SR <br\>
[2] SA permite o movimento <br\>
[3] SR executa os movimentos recebidos <br\>
[4] SR informa a SA sua coordenada <br\>
Caso de uso: Receber coordenada das caças <br\>
Ator Primário: SA <br\>
Identificador: RCC <br\>
Sumário: SA envia as coordenadas das caças ao SR <br\>
Pré condições: SR estar em modo autônomo <br\>
Fluxo Principal: <br\>
[1] SS escolhe o modo autônomo
[2] SA gera as coordenadas das caças <br\>
[3] SA distribui essas coordenadas para o SR <br\>
Caso de uso: Procurar caça <br\>
Ator Primário: SR <br\>
Identificador: PCR-CC <br\>
Sumário: SR verifica se está em cima da caça ou ainda não. <br\>
Pré condições: Estar no modo autônomo <br\>
Fluxo Principal: <br\>
[1] SR é selecionado para o modo autônomo <br\>
[2] SR usa seu algoritmo de busca para chegar a caça <br\>
[3] Ao chegar em uma caça ele informa ao SS que achou uma caça <br\>
Caso de uso: Mover autônomo <br\>
Ator Primário: SR <br\>
Identificador: MV-AUTO <br\>
Sumário: SR usa de seu algoritmo para achar o caminho mais rápido até a caça <br\>
Pré condições: Estar em modo autônomo <br\>
Fluxo Principal: <br\>
[1] SR é selecionado em modo autônomo <br\>
[2] SR se movimenta com base em seu algoritmo <br\>
[3] Se SR achar a caça, ele informa ao SS <br\>
Caso de uso: Obter caça <br\>
Ator Primário: SR <br\>
Identificador: OBT-C <br\>
Sumário: Quando SR achar uma caça ele informa ao SS. SS informa ao SA para validar ou não a caça. Quando validada, contabiliza um ponto para quem a achou<br\>
Pré condições: Achar a caça <br\>
Fluxo Principal: <br\>
[1] SR se movimenta para cima da caça <br\>
[2] SR informa que achou a caça para SS <br\>
Caso de uso: Atualizar mapa <br\>
Ator Primário: SR <br\>
Identificador: ATLZ-MP <br\>
Sumário: A cada evento importante e/ou um tempo definido o SA atualiza o mapa e repassa para o SS e SR <br\>
Pré condições: Conexões estabelecidas <br\>
Fluxo Principal: <br\>
[1] SR achou uma caça ou algum outro evento aconteceu <br\>
[2] SA atualiza seu mapa <br\>
[3] SA repassa o mapa para SS <br\>
[4] SA repassa o mapa para SR <br\>
|
|
