Unidade 2
- Aula 6 (1 mar)
-

- Resposta em frequência: para obter a resposta em frequência é necessário avaliar




- O projeto de filtros analógicos é realizado em 2 etapas:
- projeto de um filtro passa baixas (LP) protótipo normalizado
 com frequência de passagem com frequência de passagem 
- transformação em frequência para o tipo de filtro (LP, HP, BP ou BS)

- Análise básica de filtros analógicos com Matlab.
- Dado um sistema linear invariante no tempo, representado pela função de transferência
 , obter a resposta de frequência do sistema (Magnitude e Fase). , obter a resposta de frequência do sistema (Magnitude e Fase).
  
b = [1 1];
a = [1 1 5];
[z1,p1,k]=tf2zp(b,a)
z2 = roots(b);
p2 = roots(a);
zplane(b,a);
%%
freqs(b,a);
%%
syms s w
H(s) = (s+1)/(s^2 + s + 5);
pretty(H(1j*w))
latex(H(1j*w))
%%
ws = logspace(-2, 1, 1000);
h = H(1j*ws);
subplot(211)
semilogx(ws,abs(h)); grid on;
subplot(212)
semilogx(ws,angle(h)/pi*180); grid on;
- Projeto de filtros analógicos do tipo Butterworth
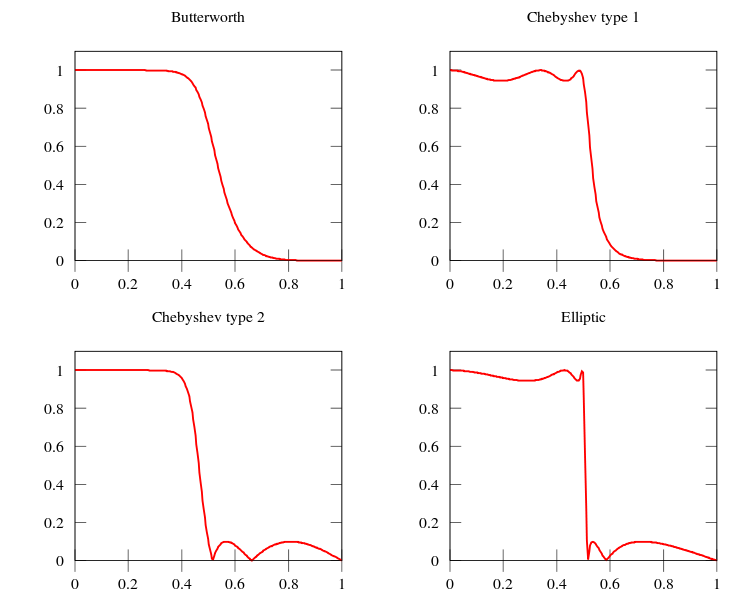
- A aproximação de magnitude de filtros analógicos pode ser realizado usando as aproximações de Butterworth, Chebyshev (tipo 1 ou 2) e Cauer.
- Proposta de exercício
- Use os polinômios de Butterworth com ordens de 1 a 10 mostrados na tabela abaixo para obter os filtros
 . .
| n |
Fatores Polinomiais de 
|
| 1
|

|
| 2
|

|
| 3
|

|
| 4
|

|
| 5
|

|
| 6
|

|
| 7
|

|
| 8
|

|
| 9
|

|
| 10
|

|
|
- Escolha uma ordem n (entre 5 e 10)
- Plote a resposta em frequência em escala log da amplitude (em dB) e da fase (em rad/pi).
- Qual é o ganho do filtro na banda passante?
- Qual é a frequência de corte (-3dB) do filtro.
- Qual é o salto de de fase que ocorre em algumas frequências?
- Qual é o fator de atenuação em dB/decada após a frequência de corte?
- Faça o diagrama de polos e zeros desse filtro.
- Procure observar o que ocorre com a posição dos polos do filtro.
- Calcule o valor do módulo dos pólos.
- Aula 7, 8 (8, 13 mar)
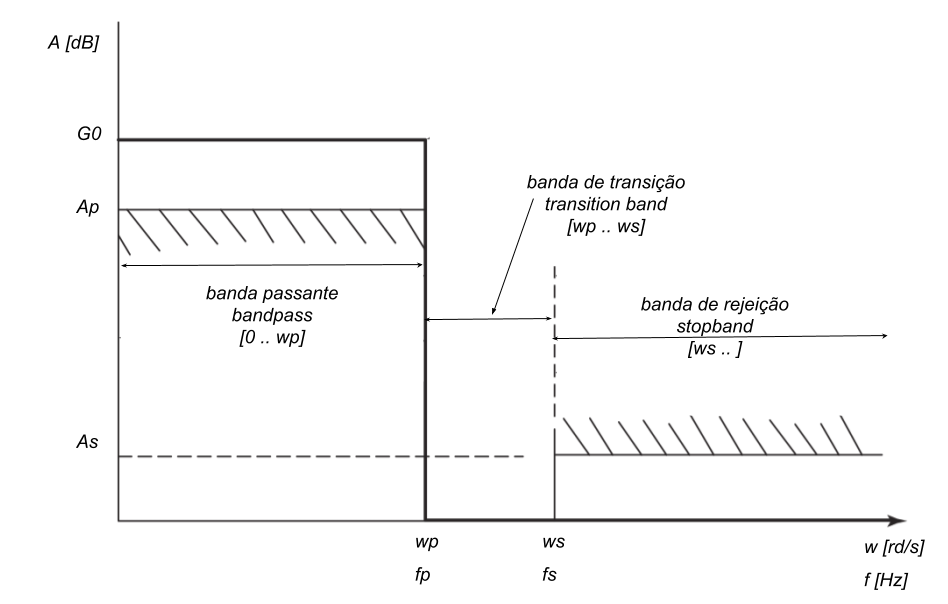
- Projeto de filtros analógicos passa baixas (low pass - LP) do tipo Butterworth, considerando:
 é a frequência de passagem, é a frequência de passagem,  é a atenuação em dB na frequência de passagem, é a atenuação em dB na frequência de passagem,  é a frequência de stopband, é a frequência de stopband,  é a atenuação em dB na frequência de stopband. é a atenuação em dB na frequência de stopband.
- Escalando as frequências em relação a
 , teremos que , teremos que  , e , e  são as frequências de passagem e stopband do filtro protótipo , que tem ganho unitário e frequência de passagem 1. são as frequências de passagem e stopband do filtro protótipo , que tem ganho unitário e frequência de passagem 1.
- Se considerarmos o caso particular em que na frequência de passagem o ganho (em escala linear) deve ser
 , que corresponde a um ganho (em escala log) , que corresponde a um ganho (em escala log)  , ou atenuação . , ou atenuação .
- Considere que
 , teremos , teremos 
- Para projetar o filtro é necessário:
- 1) determinar a ordem
 do filtro: do filtro:

- 2) obter os polos do filtro:
![{\displaystyle p_{k}=e^{\left[j{\frac {(2k+n-1)}{2n}}\pi \right]},k=1,2,3,...n}](https://en.wikipedia.org/api/rest_v1/media/math/render/svg/e1e57e07651290d1e23c546bd09becd1e13dcc07)
- 3) obter a função de transferência:
 , onde , onde 
- No caso de um filtro LP é necessário ainda obter a função de transferência do filtro especificado fazendo a transformação de frequência


- Para qualquer

- Teremos
- Para projetar o filtro é necessário:
- 1) determinar a ordem do filtro:
![{\displaystyle n\geq {\frac {\log[(10^{0.1A_{s}}-1)/\epsilon ^{2}]}{2\log \Omega _{s}}}}](https://en.wikipedia.org/api/rest_v1/media/math/render/svg/baa878dd6bbe5a4d63ecda5c4e4dffe1e90e7ece)
- 2) obter os polos do filtro:
![{\displaystyle p_{k}=\epsilon ^{(-1/n)}e^{\left[j{\frac {(2k+n-1)}{2n}}\pi \right]},k=1,2,3,...n}](https://en.wikipedia.org/api/rest_v1/media/math/render/svg/0d089a7333523020d18a5fc153299ffe65966e6d)
- 3) obter a função de transferência:
 , onde , onde  e . e .- NOTA: o valor
 também pode ser obtido a partir de também pode ser obtido a partir de  , pois corresponde ao último termo do polinômio , pois corresponde ao último termo do polinômio  . .
- No caso de um filtro LP é necessário ainda obter a função de transferência do filtro especificado fazendo a transformação de frequência
- Aula 9 e 10 (15 e 20 mar)
- Projeto de filtros analógicos do tipo Chebyshev I.
Os polinômios de Chebyshev de primeira ordem são definidos pela relação recursiva:
  
Os primeiros cinco polinômios de Chebyshev de primeira ordem são:
     
- Determine a ordem mínima necessária considerando: é a frequência de passagem do filtro LP, é a atenuação em dB na frequência de passagem, é a frequência de stopband do filtro, é a atenuação em dB na frequência de stopband, , , são as frequências de passagem e stopband do filtro protótipo.

- Em seguida obter os polos do filtro:
 , onde , onde 


- Para obter a função de transferência:
 , onde , onde - onde
 se n é par se n é par se n é impar se n é impar é o último termo do denominador D(p) é o último termo do denominador D(p)
- Projeto de filtros analógicos do tipo Butterworth, Chebyshev I e II e Cauer (eliptico) usando funções do Matlab.
%% Projeto de filtro passa-baixas usando funções do Matlab
%% Especificações do filtro
Wp =16000; Ws = 20000; Ap = 0.3; As = 20; G0= 3;
% Para analisar o filtro projetado, use fvtool(b,a) para observar plano s, resposta em magnitude, fase e atraso de grupo
%% Butterworth
[n,Wn] = buttord(Wp, Ws, Ap, As,'s')
[b,a] = butter(n,Wn, 's');
%% Chebyshev I
n = cheb1ord(Wp, Ws, Ap, As,'s')
[b,a] = cheby1(n,Ap, Wp, 's');
%% Chebyshev II
n = cheb2ord(Wp, Ws, Ap, As,'s')
[b,a] = cheby2(n,As, Ws, 's');
%% Elliptic - Cauer
[n, Wn] = ellipord(Wp, Ws, Ap, As,'s')
[b,a] = ellip(n,Ap,As, Wn, 's');
- Ver pag. 204 a 208 de [2]
- Aula 11 a 13 (22,27, 29 mar)
- Transformações de frequência de filtros analógicos
- passa-baixas (
 ) -> passa-baixas () ) -> passa-baixas ()
- Substituição de variáveis

- Cálculo do protótipo com
- passa-baixas () -> passa-altas ()
- Substituição de variáveis

- Cálculo do protótipo com

- passa-baixas () -> passa-faixa (
 e e  ) )
- Substituição de variáveis

- Cálculo do protótipo com

- onde
 e e 
- passa-baixas () -> rejeita-faixa ( e )
- Substituição de variáveis

- Cálculo do protótipo com

- onde e
-
- Ver pag. 208 a 218 de [2]
- Exemplos de Filtros Analógicos:
- Exemplo 1: Filtro passa-baixas (
 = 941Hz, = 941Hz,  = 1209 Hz, = 1 dB, = 20 dB) = 1209 Hz, = 1 dB, = 20 dB)
- Exemplo 2: Filtro passa-altas ( = 1209 Hz, = 941Hz, = 1 dB, = 20 dB)
- Exemplo 3: Filtro passa-faixa (
 = 811 Hz, = 811 Hz,  = 895,5 Hz = 895,5 Hz  = 770 Hz, = 770 Hz,  = 941 Hz, = 1 dB, = 941 Hz, = 1 dB,  = 30 dB) = 30 dB)
- Exemplo 5: Filtro rejeita-faixa ( = 53 Hz, = 58 Hz, = 62 Hz = 67 Hz, = 2 dB, = 25 dB)
- NOTA:
- No calculo do filtro lembre-se de usar as frequências angulares para , ,
 , . , .
- onde () é a frequência de passagem em Hz (rad/s), () é a frequência de rejeição em Hz (rad/s),
 () é a frequência central em Hz (rad/s), () é a largura de banda em Hz (rad/s). () é a frequência central em Hz (rad/s), () é a largura de banda em Hz (rad/s).
- Confira os projetos dos filtros plotando as respostas em frequência dos filtros protótipo H(p) e filtro final H(s) de cada um dos exemplos.
- Aula 14 e 15 (3 e 5 abr)
- Filtros Digitais: Filtros IIR: transformações do tempo contínuo no tempo discreto
- Transformação invariante ao impulso (pode ser usada apenas para filtros com forte atenuação em frequência altas, ex: passa-baixas e passa-faixa)
- Transformação bilinear (pode ser usada para todos tipos de filtro)

- Obter a especificação do filtro em angulo entre 0 e 1, onde 1 corresponde a metade da frequência de amostragem

- Obter o valor desse angulo predistorcido
 para compensar a distorção na frequência causada pela transformação bilinear para compensar a distorção na frequência causada pela transformação bilinear  , onde , onde 
- passa-baixas () -> passa-baixas (
 ) )
- Substituição de variáveis

- Cálculo do protótipo com

- passa-baixas () -> passa-altas ()
- Substituição de variáveis

- Cálculo do protótipo com

- passa-baixas () -> passa-faixa (
 e ) e )
- Substituição de variáveis

- Cálculo do protótipo com

- onde
 e e 
- passa-baixas () -> rejeita-faixa ( e )
- Substituição de variáveis

- Cálculo do protótipo com

- onde e
- Realizar os projetos dos exemplos anteriores, considerando uma frequencia de amostragem de 8 kHz.
- Ver pag. 219 a 229 de [2]
- Ver pag. 403 a 415 e 434 a 435 de [1]
- Aula 16 (10 abr)
-
- O projeto dos filtros digitais IIR baseados na transformada bilinear no Matlab é realizada em dois passos: (1) Determinação da ordem do filtro; (2) Determinação dos coeficientes do numerador
 e denominador e denominador  de de  . .
fa = 200;
fN = fa/2;
wo = 60/fN; bw = 10/fN;
[b,a] = iirnotch(wo,bw);
fvtool(b,a);
syms z;
N(z) = poly2sym(b,z);
D(z) = poly2sym(a,z);
H(z) = N(z)/D(z);
pretty(vpa(H(z),3))
fa = 8000;
fN = fa/2;
wo = 941/fN; bw = 100/fN;
[b,a] = iirpeak(wo,bw);
fvtool(b,a);
syms z;
N(z) = poly2sym(b,z);
D(z) = poly2sym(a,z);
H(z) = N(z)/D(z);
pretty(vpa(H(z),3))
fa = 8000; fN = fa/2;
fo = 1000; bw = 20/fN;
[b,a] = iircomb(fa/fo,bw,'peak'); % ou use a flag 'notch'
fvtool(b,a);
syms z;
N(z) = poly2sym(b,z);
D(z) = poly2sym(a,z);
H(z) = N(z)/D(z);
pretty(vpa(H(z),3))
|








































