|
|
| Linha 178: |
Linha 178: |
| | </font> | | </font> |
| | {{Collapse top | Diagrama Geral do Projeto}} | | {{Collapse top | Diagrama Geral do Projeto}} |
| − | [[Arquivo:Diagrama_de_Blocos_Visao_Geral.jpg|center|Diagrama Geral do Projeto]] | + | [[Arquivo:Diagrama_de_Blocos_Robo.jpg|center|Diagrama Geral do Projeto]] |
| | {{collapse bottom | Diagrama Geral do Projeto}} | | {{collapse bottom | Diagrama Geral do Projeto}} |
| | | | |
Edição das 17h35min de 18 de agosto de 2018
Projeto Integrador II
Alunos: João Leonardo Martins (joao.lm@aluno.ifsc.edu.br) e Vinícius Luz (vinicius.ls@aluno.ifsc.edu.br)
Objetivo Geral
Implantar tradicional caça de robôs para buscar determinados itens através de coordenadas.
Bibliografia
- BEZERRA, Eduardo. Princípios de análise e projetos de sistemas com UML, 2002. Rio de Janeiro. Editora Campus LTDA.
Diário das Aulas
30/7/18
| Aula 1
|
|
- Definição do grupo;
- Aula expositiva;
- Organização das tarefas através da ferramenta Trello;
|
6/8/18
| Aula 2
|
|
- Efetuada a leitura da documentação do EV3-Python: apesar do bot já possuir o linux instalado, estudamos como seria a implementação do mesmo;
- Início da montagem do robô: encontramos algumas dificuldades pois o equipamento estava completamente desmontado, com isso, até entendermos que a montagem seria basicamente livre, sofremos um pouco na idealização do EV3;
- Alinhamento sobre comunicação com o robô: ficou definido que vamos utilizar um adaptador wi-fi no mesmo, sendo assim, um terceiro equipamento se fez necessário, uma vez que a o EV3 não conecta na rede do Instituto;
- Alguns exemplos de implementação foram observados na documentação do EV3, conforme pode ser obtido através destes links: Exemplos Motor e Exemplos Sensor
- Diagrama Geral do Projeto:
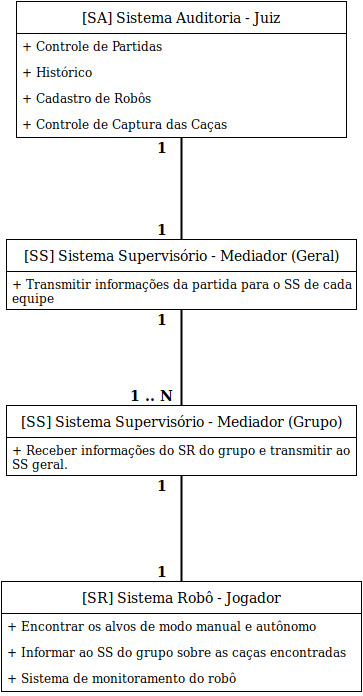 Diagrama Geral do Projeto
| Classe Motor
|
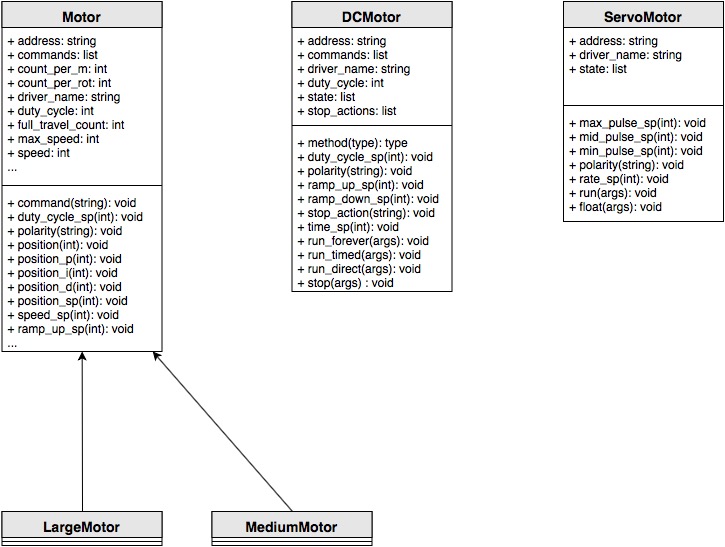 Diagrama de Classe - Motor |
| Classe Sensor
|
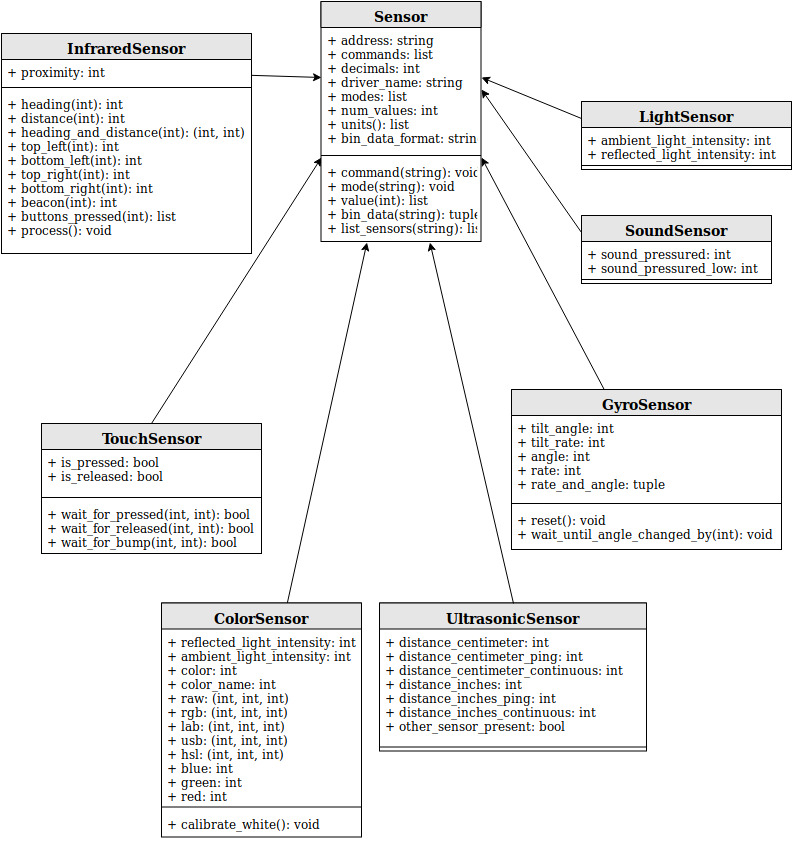 Diagrama de Classe - Sensor |
| Requisitos Funcionais
|
|
- RF01 O sistema deve permitir criação e gerência de cadastro de um robô.
- [SA] - O que deve ter neste cadastro? Como deve ser feito o cadastro, web?
- Sugestão: usuário, senha, nome. Cadastro via Web.
- RF02 O sistema de deve manter um histórico das partidas realizadas.
- [SA] - Qual tamanho do histórico?
- Sugestão: O histórico deve manter o resultado das últimas com o nome dos robôs participantes.
- Sugestão: 100 últimas partidas.
- RF03 O sistema deve ser capaz de fazer a autenticação dos robôs cadastrados.
- [SA] - Em que momento é feita a autenticação?
- Sugestão: a autenticação será ao iniciar uma partida. Antes de iniciar, solicitar partida.
- RF04 Os robôs devem ser capazes de operar nos modos manual e autônomo.
- [SR] - Existe algum requisito sobre o modo manual? Por onde o robo deve ser guiado?
- Sugestão: interface onde se possa utilizar as setas direcionais do teclado.
- RF05 O sistema deve validar e contabilizar as caças já encontradas pelo robô.
- [SA] - Afinal, o que será a caça? Como validar?
- RF06 O sistema deve dar início a partida, sortear os locais das caças e informá-los aos robôs.
- [SA] - Sortear os locais e informar, ou fazer tudo junto? Isso pode mudar a estratégia do robô. Onde será o início?
- Sugestão: primeiro sortear a informar os locais das caças. Depois iniciar.
- Sugestão: início no canto do tabuleiro.
- RF07 O sistema deve prover uma interface de monitoramento para o robô em modo autônomo.
- [SR] - Há algum requisito para a interface de monitoramento?
- Sugestao: o sistema deve conter o número de caças encontradas e o trajeto realizado. Poderá ser feito via mensagens na tela.
- RF08 O sistema deve prover uma interface de controle e monitoramento para o robôs em modo manual.
- [SR] - Existe algum requisito sobre o modo manual? Por onde o robo deve ser guiado?
- Sugestão: interface onde se possa utilizar as setas direcionais do teclado.
- RF09 O sistema deve permitir que, quando em modo autônomo, o robô execute os movimentos programados a partir do algoritmo implementado.
- [SR] - OK
- RF010 O sistema deve permitir pausa e reset da partida.
- [SA] - No reset, os robôs devem voltar ao início ou fazemos manualmente?
- Sugestão: Fazer manualmente.
- RF011 O sistema deve permitir que os resultados do jogo sejam vistos pelos espectadores em tempo real.
- [SA] - Há algum requisito para esta visualização?
- Sugestão: Interface web simples, com o placar do jogo.
- RF012 O sistema não deve permitir que os robôs se choquem.
- [SR] - OK
- RF013 O sistema deve declarar um vencedor assim que todas as caças forem encontradas.
- [SA] - OK, e os robôs devem parar as suas buscas.
- RF014 Antes de iniciar a partida, o sistema deve verificar a posição atual dos robôs.
- [SA] - Este requisito será necessário caso o ponto de partida seja sempre o mesmo (RF006).
- RF015 Após capturar uma caça, o robô deve avisar o SS, que por sua vez, deve avisar o SA para validação da caça. Esta validação deve retornar ::ao SR, confirmando-a ou não.
|
| Requisitos Não Funcionais
|
- RNF01 A interface do sistema de comunicação com o usuário deve ser intuitiva.
- [SA] - Como será essa interface, afinal? Web?
- RNF02 O tabuleiro será composto por linhas pretas e todos com cor.
- [SR] - Como assim? Não entendi.
- Pelo que entendi, as linhas pretas (algo como uma fita isolante), serão utilizadas para limitar os quadrados coloridos, que terão diversas ::cores e somente uma ou outra será considerada caça.
- RNF03 O tabuleiro terá as dimensões definidas (2m x 2m).
- OK
- RNF04 O tabuleiro será composto por 100 quadrados de dimensões: 20cm x 20cm.
- OK
- RNF05 O tabuleiro será limitado por uma borda vermelha.
- OK
- RNF06 O placar mostrado aos usuários deve ser de fácil identificação.
- OK, web?
- RNF07 O robô deve ter uma cor para identificação.
- Cada robô possui uma cor pré-definida ou o SA define no momento da partida?
- O robô deve ter uma etiqueta de identificação.
|
| Papéis dos Atores
|
| Ator |
Papel
|
| Usuário |
Iniciar partida em modo autônomo
|
| Usuário |
Iniciar partida em modo manual
|
| Usuário |
Controlar robô em busca de caças no modo manual
|
| Usuário |
Monitorar robô em modo autônomo
|
| Usuário |
Posicionar o robô para o início da partida
|
| SS |
Informar ao robô onde estão as caças
|
| SS |
Informar ao robô se a caça encontrada foi validada
|
| SS |
Informar ao robô sobre o início da partida
|
| SS |
Informar ao robô sobre o término da partida
|
| SS |
Informar ao robô se a autenticação foi validada
|
| SS |
Informar ao robô sobre pausas na partida
|
| Onde: SS - sistema supervisório; Usuário - jogador
|
|
| Casos de Uso
|
|
- Construção diagramasr.png de diagrama UML conforme bibliografia:
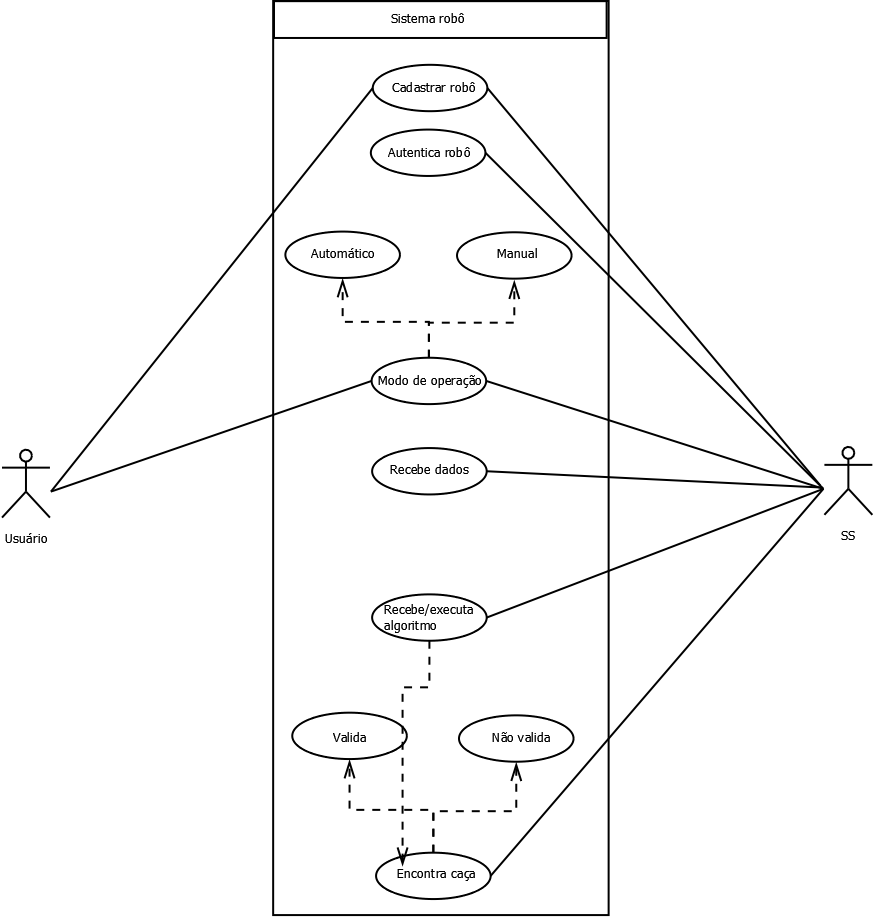 Imagem 1: diagramas de casos de uso para o SR |
|
13/8/18
| Aula 3
|
|
Levantamentos sobre discussões em sala
Alteração da definição do diagrama geral do projeto.
| Diagrama Geral do Projeto
|
|
|
Pontos levantados a respeito dos requisitos de projeto.
| Considerações sobre requisitos do projeto
|
|
Sistema Robô [SR]
- Deve ter um ID para validação e será baseado no MAC do Bluetooth do robô;
- A posição inicial sempre será (0,0) ou (20,20);
- A cor do robô será definida no momento do cadastro no SA.
Sistema Supervisório [SS]
- Modo manual: movimentações para direita, esquerda, cima e baixo;
- Não há requisitos para a interface com usuário, poderá ser web, desktop, etc;
- A caça será uma coordenada, que varia de (0,0) a (20,20);
- No modo automático, o monitoramento do robô deverá exibir informações sobre as caças encontradas e a sequência de movimentações;
- Para reinício da partida, o jogador deverá reposicionar manualmente o robô nas posições iniciais;
- SS deverá informar ao SA que está pronto para iniciar uma partida;
- O robô deverá parar enquanto aguarda a validação da caça.
Sistema Auditoria [SA]
- A validação da caça deverá ser manual;
- O SA deverá informar o SS do início da partida, já com a localização das caças.
|
Códigos executados para testes no robô.
| Código teste motor
|
|
- !/usr/bin/env python3
from ev3dev.ev3 import *
import time
m_l = Motor(OUTPUT_B)#left motor
m_r = Motor(OUTPUT_C) #right motor
- run forward for tree seconds:
m_l.run_timed(time_sp=3000, speed_sp=500)
m_r.run_timed(time_sp=3000, speed_sp=500)
time.sleep(2)
- run "forever"
for x in range(0,500):
x=x+1
m_l.run_forever(speed_sp=50)
m_r.run_forever(speed_sp=50)
if x ==500:
m_l.stop(stop_action='brake')
m_r.stop(stop_action='brake')
- turn back
m_l.run_timed(time_sp=3000, speed_sp=-500)
m_r.run_timed(time_sp=3000, speed_sp=-500)
time.sleep(2)
for y in range(0,500):
y=y+1
m_l.run_forever(speed_sp=-50)
m_r.run_forever(speed_sp=-50)
if y ==500:
m_l.stop(stop_action='brake')
m_r.stop(stop_action='brake')
- rotate
m_l.run_timed(time_sp=3000, speed_sp=500)
time.sleep(3)
m_r.run_timed(time_sp=3000, speed_sp=500)
</syntaxhighlight>
|
| Código teste luminosidade
|
|
- !/usr/bin/env python3
from ev3dev.ev3 import *
from time import sleep
- Connect EV3 color sensor and check connected.
cl = ColorSensor()
assert cl.connected, "Connect a color sensor to any sensor port"
- Put the color sensor into COL-REFLECT mode
- to measure reflected light intensity.
- In this mode the sensor will return a value between 0 and 100
cl.mode='COL-REFLECT'
while True:
print(cl.value())
sleep(1)
</syntaxhighlight>
|
|




