De MediaWiki do Campus São José
Ir para navegação
Ir para pesquisar
|
|
| Linha 2: |
Linha 2: |
| | | | |
| | <font size="3px" face="Arial"> | | <font size="3px" face="Arial"> |
| − | =<font size="10px" face="Arial">Emotiv EPOC neuroheadset in Brain – Computer Interface</font> = | + | =<font size="5px" face="Arial">Emotiv EPOC neuroheadset in Brain – Computer Interface</font> = |
| | Alunas: Karolina Holewa, Agata Nawrocka | | Alunas: Karolina Holewa, Agata Nawrocka |
| | <br>Universidade: AGH University of Science and Technology - Department of Process Control - Cracow, Poland | | <br>Universidade: AGH University of Science and Technology - Department of Process Control - Cracow, Poland |
Edição das 08h32min de 1 de novembro de 2017
| Emotiv EPOC neuroheadset in Brain – Computer Interface
|
|
Emotiv EPOC neuroheadset in Brain – Computer Interface
Alunas: Karolina Holewa, Agata Nawrocka
Universidade: AGH University of Science and Technology - Department of Process Control - Cracow, Poland
Objetivo
O artigo apresenta um projeto de Sistema Interface cérebro-computador (BCI), comunicação em ondas cerebrais para controle de dispositivos mecânicos. O objetivo deste projeto é aprimorar o estudo e desenvolvimento de tecnologias a favor da acessibilidade, principalmente de pessoas com distúrbios neurológicos graves.
Projeto
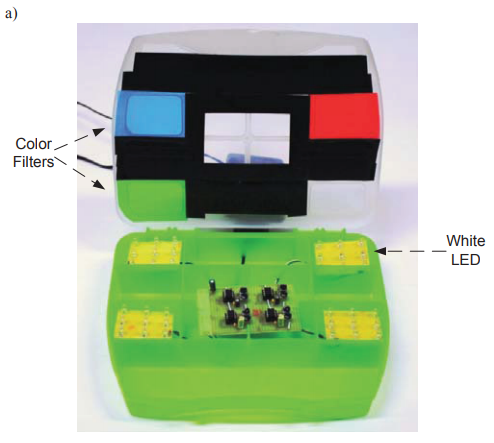
Painel de LED
 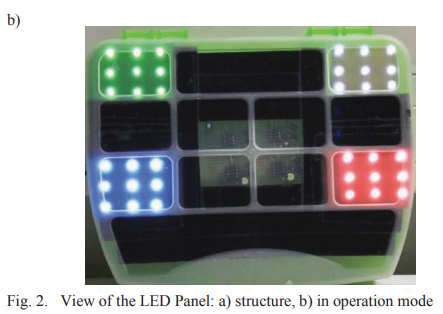
O dispositivo Emotiv EPOC
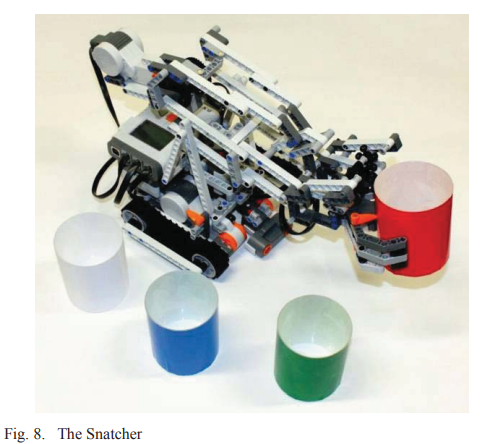
O robô LEGO Mindstorms
Funcionamento
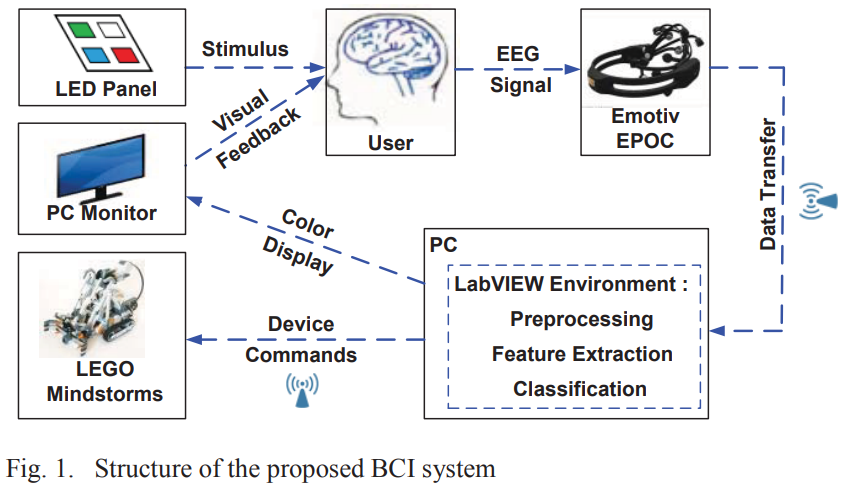
O painel LED possui 4 campos de 4 cores diferentes, cada cor atribui-se a uma frequência. O usuário seleciona uma cor, o campo de cor correspondente acende e o respectivo usuário concentra-se nesta cor. Sua visão gera estímulos cerebrais, SSVEP (Steven-State Visual Evoked Potentials). O dispositivo Emotiv EPOC, capacete constituído de eletrodos, grava os sinais de eletroencefalograma (EEG) e os transfere para o computador, esses dados são analisados por um software. Inicialmente são colocados 4 objetos que correspondem as 4 cores do painel próximos ao robô. Este recebe o resultado analisado pelo software. O robô levanta cada objeto e analisa sua cor, se esta corresponder a frequência, muda-se o local do objeto, caso contrário, o robô devolve-o para a localização inicial. Isto é possível através de sensores de cor e localização presentes no robô.
Experimento
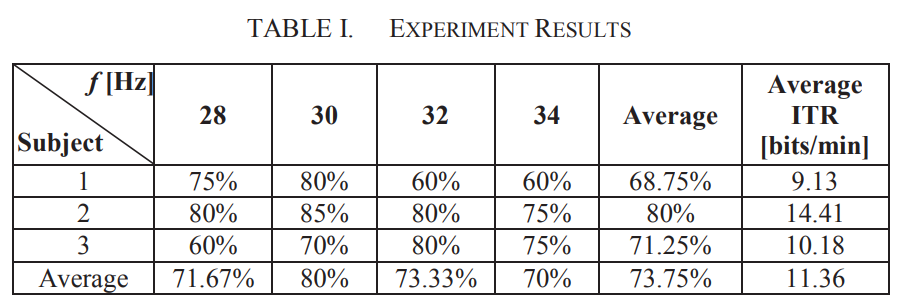
Foram realizados experimentos para 3 indivíduos com visão normal ou corrigida para normal. Durante os experimentos, os sujeitos foram direcionados para focar a freqüência selecionada por 4 segundos.
O experimento foi dividido em duas sessões. Cada sessão foi composta por 10 ensaios para cada frequência. Entre a sessão foi 5 minutos de período de descanso. A Tabela I mostra os resultados da experiência.
Conclusão
Com uma taxa de eficácia média de 73,75% e taxa média de ITR de 11,36 bits por minuto, o projeto demonstra a possibilidade de construção de um sistema BCI móvel e de fácil manipulação. Tendo em vista o avanço em pesquisas da área de acessibilidade.
|





